V
主页
京东 11.11 红包
NeRF在机器人技术中 应用的最新综述,旨在为 该领域提供重要参考指南
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
清华最新综述:第一个专门针对NeRF在自动驾驶领域应用的调查,旨在弥补当前文献中存在的明显空白
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
来自中科院关于3DGS进展的最新综述,该团队的本次调查旨在帮助初学者快速进入该领域,并为经验丰富的研究人员提供全面的概述
首个关于NeRF与3DGS如何重塑SLAM的最新综述,旨在为初学者和资深专家提供重要的指南
Gaussian-Flow:使用动态3D高斯粒子进行4D重建
SA-GS:在3D高斯抛雪球中实现SAM任意物体分割,无需任何训练过程和学习参数,通过交互式过程实现3D高斯抛雪球物体分割
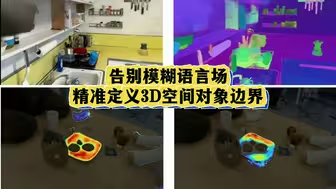
CVPR 2024 Highlight【清华、哈佛】|LangSplat:3D语言高斯溅射,告别模糊语言场,精准定义3D空间对象边界
ECCV'24 Oral | MVSplat:从稀疏多视图图像中实现高效的3DGS,用更少的参数,速度快2倍,还能跨数据集泛化
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
基于图像的3D重建方法:无需COLMAP的3D高斯Splatting技术
关于3DGS的最新综述,3D重建与新型视图合成
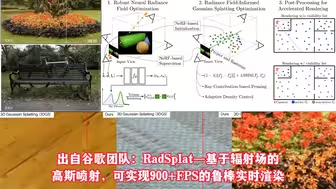
出自谷歌团队,RadSplat: 基于辐射场的高斯喷射,可实现 900+ FPS 的鲁棒实时渲染
无视干扰,谷歌开源SpotlessSplats:3D场景重建中的干扰物识别与排除
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
黑神话·悟空爆火,有哪些AI技术在助力?
基于3D高斯渲染技术的高速稠密建图:SplaTAM
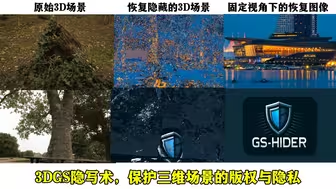
3DGS隐写术—GS-Hider,用以保护三维场景的版权与隐私【可在主页预约与3DGS相关的两场直播公开课】
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
CVPR'24 | NeRF新突破,启发式引导分割解决瞬态干扰
一款面向无人机领域相关专业应用研究和二次开发的中小型自主智能无人机平台:问天L240自主智能无人机实验平台
自主机器人技术线上研讨会第一期:嘉宾仲星光,报告:基于隐式神经表示的LiDAR SLAM
CVPR 2024 | 如何给NeRF开透视眼?结合医疗领域的"它"就够了
最新开源MVSGaussian:基于多视角 立体图像的快速通用高斯溅射重建 训练提速13倍,渲染300+FPS
超越所有SOTA!3DGS结合NeRF到4DGF 重塑动态城市场景新视图合成
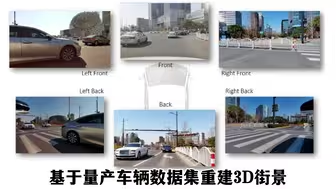
T-ITS | 秦通团队 Crowd-Sourced NeRF: 基于量产车辆数据集重建3D街景
机器人顶级期刊RA-L2023年 Best Paper "H2 Mapping:使用 分层混合表示的实时密集建图"
浙大最新开源!HVOFusion:使用混合体素八叉树进行增量网格重建
拒绝失真,个性化人脸图像修复方法——双支点调节技术
(清华&英伟达)高保真度!DriveEnv-NeRF:基于NeRF搭建真实自动驾驶环境
说话人脸合成新框架NeRF-AD,使图像生成质量和嘴型同步提升,解决不能精准地将音频映射到由语音运动相关面部区域的问题
CVPR2024 | RegionPLC区域点云-语言对比学习,塑造3D开放世界场景理解新标准
国内智驾老兵百度开源BEVWorld:通过统一BEV潜在空间实现自动驾驶的多模态世界模型
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
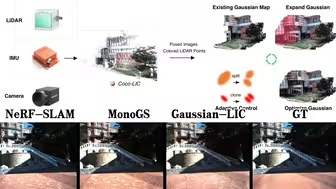
浙大TUM联合出品|Gaussian-LIC:首个LiDAR-IMU-Camera融合的3DGS-SLAM系统
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
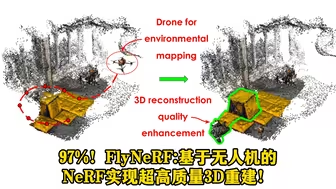
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
移动机器人运动规划方法分类
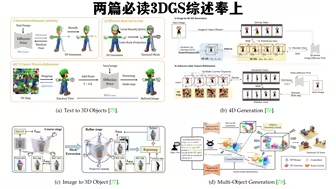
两篇与3DGS有关的综述奉上,<3DGS:调查、技术、挑战和机遇>主:<高斯分层:3D 重建与新新型视图合成>
综述:自动驾驶的多智能体强化学习,旨在帮助研究人员整合多智能体强化学习技术
火爆全网的NeRF技术到底是什么黑科技,它与三维重建究竟有什么不同