V
主页
京东 11.11 红包
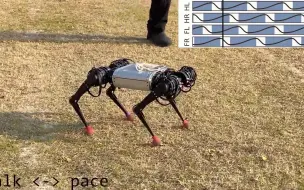
Learning Free Gait Transition for Quadruped Robots via Phase-Guided Controller
发布人
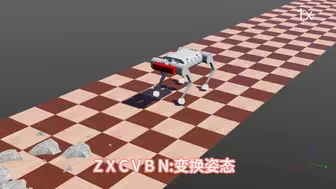
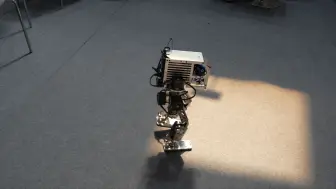
Learning Free Gait Transition for Quadruped Robots Via Phase-Guided Controller Authors: Yecheng Shao, Yongbin Jin, Xianwei Liu, Weiyan He, Hongtao Wang, Wei Yang Accepted by IEEE Robotics and Automation Letters: https://ieeexplore.ieee.org/document/9656601 Abstract: Gaits and transitions are key components in legged locomotion. For legged robots, describing and reproducing gaits as well as transitions remain longstanding challenges. Reinforcement learning has become a powerful tool to formulate controllers for legged robots. Learning multiple gaits and transitions, nevertheless, is related to the multi-task learning problems. In this work, we present a novel framework for training a simple control policy for a quadruped robot to locomote in various gaits. Four independent phases are used as the interface between the gait generator and the control policy, which characterizes the movement of four feet. Guided by the phases, the quadruped robot is able to locomote according to the generated gaits, such as walk, trot, pacing and bounding, and to make transitions among those gaits. More general phases can be used to generate complex gaits, such as mixed rhythmic dancing. With the control policy, the Black Panther robot, a medium-dog-sized quadruped robot, can perform all learned motor skills while following the velocity commands smoothly and robustly in natural environment. ©2021 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, includingr eprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, orreuse of any copyrighted component of this work in other works.
打开封面
下载高清视频
观看高清视频
视频下载器
[ICRA2022] Learning Free Gait Transition via Phase-Guided Controller
QB-SaW:Decentralized Contol of Standing and Walking for Quadruped & Biped Robots
DeeperMimic:(基于实时动画的)四足机器人多技能控制
[SIGGRAPH 2024] Categorical Codebook Matching for Embodied Character Controllers
斯坦福大学最新!Helpful DoggyBot:四足机器人在开放世界中取回任意物体
Diffusion-based Path Planner for Synthesizing Trajectories Applied on Quadruped
Matlab玩家狂喜!!!纵享丝滑~
四足机器人足臂协同 ocs2 qm_control 开源项目学习
依托自研关节电机组件的机器人,可实现载人行走。四足狗售价3.9万,关节电机售价2499。
Semantic Traversability Estimation Using Pose Projected Feature
学习小记:如何解决Rviz和Gazebo中机器人运动不同步的问题(Rviz中机器人固定不动的问题)
22年跑的legged_control 现在看依旧炸裂
OCS2 安装例程demo测试 太难安装了 但是库确实牛!!!
使用ROS2 Control来控制四足机器人
【中文注解】波士顿动力四足机器人Spot推出了声振检测和现实捕捉的新功能|2024.09.24
在IsaacLab中的UnitreeA1上重放AMP动捕数据
Neural Scene Representation for Locomotion on Structured Terrain
Isaacsim/IsaacLab中URDF-USD模型转换,碰撞体查看与修复
宇树科技的竞争对手 | 中国杭州机器人公司|云深处科技 融资过亿|3款机器狗产品 | 了解云深处科技 怎能错过这个视频 | 宇树科技 | 波士顿动力
四足机器人萌宠,手把手教教你制作,资料评论区自取!!!
3d打印机器狗
Agile Continuous Jumping in Discontinuous Terrains
WRC2024 LimX CL-1 搬运物品 Live Demo 逐际动力
ETH提出基于学习的四足机器人爬梯子控制方法 | 附论文
祝大家中秋快乐,万事如意!!!
再调几天就开源-纯mpc-matlab代码很适合大家入门
显眼包助力马拉松#机器人也爱显摆
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
使用运动约束强化学习的四足机器人
【仿真开源】四足机器人MPC webots+matlab 初学入门 简介链接
使用urdf在ROS2中构建四足机器人的Gazebo和Mujoco仿真
使用普通商用零件低成本DIY构建四足机器人然后基于强化学习控制
Moco12缩比MIT Mini Cheetha的8自由度四足机器人3D数模图纸
SOTA ! 浙大最新成果!四足强化学习走梅花桩!
强化学习四足机器人一
千岛湖夜景延时1
强化学习四足机器人二
千岛湖夜景延时2
IsaacLab交流群及文档更新说明
WRC2024 高擎 小Pi Live Demo