V
主页
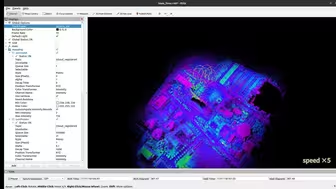
对ORBSLAM3 的修改!
发布人
修改了之后地图的初始位置和方向角,另外viewer里面的红框跟ORBSLAM3没有关系,没有完成回环检测之后的修改。Kitti 09数据集。
打开封面
下载高清视频
观看高清视频
视频下载器
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
视觉SLAM进阶-从零开始手写VIO
视觉SLAM VIO开源代码解析
“你滴什么滴干活”居然是正经的日语.
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
当师妹说怀了你的孩子时……
OAK相机的SLAM建图
弱光环境下的SLAM系统
GPS+IMU+3D激光建图
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
【空间计算】VIOBOT2 室内 定位 导航【里程计】【实测】
小小的调试一下
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
浙大章国锋团队最新NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限(上篇)
Infinite-SLAM,建图与标定工具部分展示
无人机SLAM入门教程(一):课程概述1.6 后端优化
A-LOAM和LeGo-LOAM的SLAM对比,使用Kitti数据集odometry的05序列
Cartographer 算法论文《Real-Time Loop Closure in 2D LIDAR SLAM》精读 激光SLAM算法
矿洞扫描有难度?看赛尔S10如何轻松应对!
无人机SLAM入门教程(一):课程概述1.3 传感器简介
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
三维空间扫描仪 高效率重建古建筑
22年十佳开源SLAM算法
这个习惯很隐蔽,但不改掉,成绩真的上不去
无人机搭载livox avia采集点云数据,rosbag记录数据,FAST-LIO建图
多旋翼无人机使用多相机SLAM同时定位
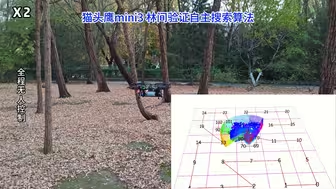
猫头鹰mini3林间验证自主搜索算法,未知环境完成自主搜索,搜索范围:20米*20米
第五届SLAM论坛高飞报告
[IEEE TCSVT 2024]语义无关的动态SLAM
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
【f1meme】当你参加考研周围全是奇葩
NeurlPS'24开源 | 迈向SLAM/SfM回环新纪元!MSG:关联场景中共视的地点和目标!
无人机SLAM入门教程(一):课程概述1.2 预备知识概览
【SLAM】LoopSplats:通过直接的3DGS注册,实现密集建图和在线回环检测的全局一致性图优化
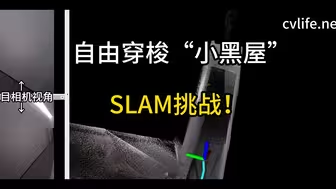
自由穿梭”小黑屋“SLAM挑战
3D建图小能手
一篇SCI换一杯酒,那就别怪我不客气了()