V
主页
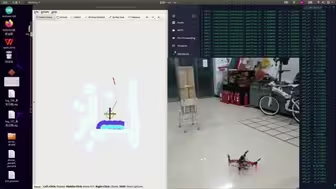
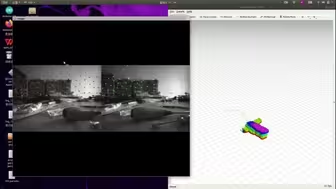
用遥控器控制无人机来进行egoplanner规划(多巴胺是人的奖励机制,但是不能让它分泌太多)
发布人
会找小惠,但是不会剪视频
打开封面
下载高清视频
观看高清视频
视频下载器
CMU(卡耐基梅隆大学)最新开源无人机规划算法,和PX4结合测试极限穿窄缝
【已开源分享】基于px4和ros navigation导航包下的无人机2d避障规划飞行
【手搓代码】搓一套简单的自己喜欢的无人机规划控制代码
【ego-planner高速飞行避障10m/s测试】速度太快了,飞机很难全程完美的贴合轨迹,所以不撞就行,作为垃圾双非菜鸡本科生对这个没有那么高要求。。。。。。
【简单玩一下】gazebo-px4-FUEL无人机自主探索飞行
请问ego里怎样能达到视频里这样的建图效果呢,求助下大佬
【暂时放弃的方案】RACER+倒置激光雷达自主探索无人机测试
基于yolov5 PX4和ros下的像素坐标和map世界系下的坐标转换(px4无人机仿真和电脑相机的软硬件在环仿真)
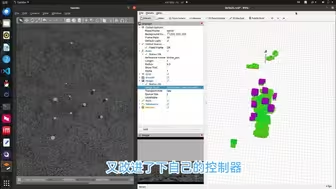
【已开源,为爱发电】egoplanner+px4的自定义控制器代码分享
自定义控制器跟踪egoplanner轨迹飞行,不用px4Ctrl,太危险了感觉
实机测试vins+卡内基梅隆大学的规划算法(相对位置修全局位置)
自主避障无人机3m/s测试【第二版控制器】
Local_planner的px4无人机自主规划控制
我导导导
【瞎搞下CMU算法×FUEL】动态实时感知快速避障的自主探索小飞机
还在玩CMU的无人机规划(穿呀穿,避呀避)
控制器V2.5版本测试,3.5m/s
一种无需建图的ros+px4导航避障无人机
ego planner的二维激光雷达建图规划
《ROS 2机器人开发从入门到实践》7.2.1构建第一章导航地图
【PX4+RACER】多机自主探索测试
【Ego-planner 5m/s高速避障+改进了下自己的控制器】黑龙江科技大学为什么有寝室断电这种莎栾东西,大晚上的写代码跑仿真没有电很难受的,蠢比学校。。。
ego planner小改grid_map.cpp进行保留障碍物建图的方法
【大学出狱第一周】视觉定位无人机kcf跟踪测试
手持slam设备(灵感源自麦克风)
pcd点云文件转换成八叉树地图
【自主探索无人机】在蠢比黑龙江科技大学树林里搞下FUEL(毕设期间放松下)
《ROS 2机器人开发从入门到实践》7.2.2将地图保存为文件
【整烂活】手搓一套PX4无人机的雷达自主探索代码
雷达视觉双退化环境下fast_livo性能测试(对比fast_lio)
具身智能-感知(P),想像(I),执行(E)PIE方案与具身大模型探索
Multi-Session Point Cloud Consistent Mapping
egoplanner的扩大地图范围的建图
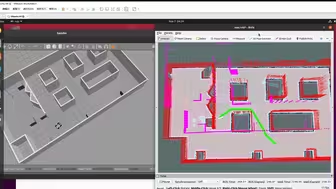
【已开源分享】FUEL无人机自主探索算法部署在实机以及PX4仿真教程
激光slam避障导航无人机
三维定位的导航
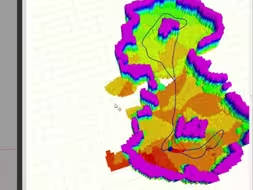
【FUEL自主探索】一点简要改进,让最后探索完成后回到起点
常见的C++代码编译错误
【三维重建】PhotoReg:光度测量三维高斯溅模型
用CMU团队的规划算法在px4下做高机动避障(控制算法写的真烦,还得多向北航的车老师和全老师团队学习啊)