V
主页
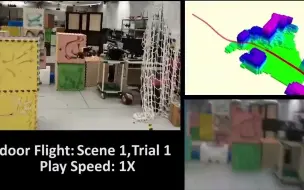
自主机器人技术线上研讨会第一期:嘉宾宋运龙,报告主题:无人机超高速飞行:强化学习与优化控制
发布人
报告嘉宾:宋运龙 在读博士,就读于苏黎世大学与苏黎世联邦理工学院的Robotics and Perception Group。导师为Davide Scaramuzza。研究方向为强化学习与优化控制在高速无人机飞行中的应用。 他的最新研究成果作为Science Robotics的封面文章发表。其它代表性论文发表在TRO, CoRL, ICRA, IROS, 和 RAL。他目前在美国MIT访问。研究方向是基于机器学习的四足机器人控制。导师为Sangbae Kim。他研究生就读于德国的达姆斯塔特工业大学,研究方向为强化学习理论,师从Jan Peters。 报告主题:无人机超高速飞行:强化学习与优化控制 强化学习和优化控制均为常用的控制算法。本次讲座,我首先会介绍如何将强化学习应用在无人机控制中。其次,我将着重介绍分析为什么强化学习比优化控制可以在超高速无人机飞行中有更好的效果。最后,我将介绍如何将强化学习与优化控制进行结合。
打开封面
下载高清视频
观看高清视频
视频下载器
移动机器人规划控制入门与实践:基于navigation2
【最强动画直观理解强化学习】强化学习训练走路的机器人!不愧是MATLAB官方教程,行走机器人/深度学习/AI/人工智能
【深度强化学习】华盛顿大学Steve Brunton教授精讲《数据驱动的科学与工程:机器学习、动态系统与控制》
【强化学习玩游戏】强化学习轮足机器人控制器,PPO算法原理+公式推导,月球登陆器训练+超级马里奥简单易懂的项目实战!
基于多智能体强化学习的多小车建图与导航
【强化学习玩游戏】简单易懂的PPO算法及公式推导!强化学习轮足机器人控制器、月球登陆器训练+超级马里奥项目实战!
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
人生苦短,我用深度强化学习零基础入门视频全套课程,PPO算法/DQN算法/A3C 保姆级教程(学完可就业)
一款面向无人机领域相关专业应用研究和二次开发的中小型自主智能无人机平台:问天L240自主智能无人机实验平台
15项将改变未来的新型技术( 纳米技术 6G 机器人 无人机 3D打印 人工智能AI AR)
强化学习的数学原理:课程背后的故事+输出到海外
DeepMind训练AI踢足球,技术精湛堪比真人
什么是卷积?强推!这绝对是全网最通俗易懂的【卷积神经网络教程】!草履虫听了都点头!人工智能、深度学习、机器学习
同济 熊溪:基于强化学习与大语言模型的智能网联交通系统决策优化「OR Talk #32」
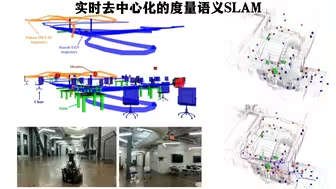
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
强推!这可能是B站最全的【Python+机器学习+深度学习】系列课程了,从入门到精通,堪称人工智能系列课程的巅峰之作!_AI/人工智能/深度学习/机器学习
基于Q-learning求解机器人路径规划问题
重发爆赞!李永乐老师深度讲解AI!带你了解电脑如何像人一样思考,带你学习AI前沿技术/人工智能/机器学习/深度学习/神经网络/计算机技术
港科大最新工作:无人机快速飞行中智能鲁棒感知和轨迹规划策略
秋招入职必刷!三小时快速上手【深度强化学习】,不愧是王树森博士,讲的实在是太通俗易懂了!
多传感器融合感知
深度强化学习 PPO 纯白板逐行代码Python实现
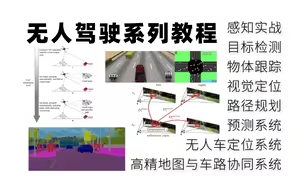
2024强推!这可能是B站目前最系统的无人驾驶技术全套教程了,一口气带你学完感知实战、视觉定位、路径规划、预测系统!!(自动驾驶/路径规划/强化学习/人工智能)
强推!不愧是李宏毅教授!一口气把机器学习、深度学习、强化学习、神经网络、生成式AI给讲透了!存下吧,真的比啃书好多了!(AI人工智能/ChatGPT)
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
强烈推荐2024年最适合新手的【人工智能】基础教程!全集带你从放弃到精通!——线性回归,梯度下降,逻辑回归,神经网络算法 ,决策树随机森林,深度学习
IsaacLab+rsl_rl强化学习
强烈推荐2024年最适合新手的【人工智能】基础教程!100集带你从放弃到精通!——线性回归,梯度下降,逻辑回归,神经网络算法 ,决策树随机森林,深度学习
2021 高翔:视觉SLAM基础
【课件+代码】李沐大神《动手学深度学习》2024最新视频教程,比啃书高效!比刷剧还爽!(人工智能丨深度学习丨神经网络)
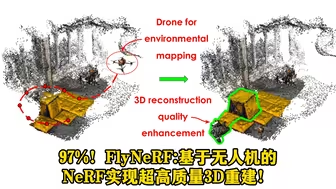
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
Nature 智能机器'24-7-封面,使用强化学习和生成预训练AI模型,举一反三,实现四足机器人逼真的敏捷性和游戏性!
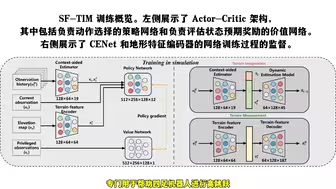
成功部署,敏捷度直接翻倍!浙大提出辅助四足机器人的跳跃新框架SF-TIM,敏捷度直接翻倍
通过深度强化学习让AI学会走路,学步过程堪比真人!
移动机器人自主路径规划
[上]6个人形双足强化学习开源项目,论文讲解,代码速读,FLD,PBRS,footstep,ExBody,humanplus,humanoid-gym
自动驾驶规划算法岗高频面试题详解
图森未来在重卡自动驾驶的最新落地与实践 | 王乃岩