V
主页
京东 11.11 红包
成功部署,敏捷度直接翻倍!浙大提出辅助四足机器人的跳跃新框架SF-TIM,敏捷度直接翻倍
发布人
SF-TIM框架为增强四足机器人的跳跃敏捷性提供了一种有效的解决方案。与现有深度相机跑酷框架相比,它减少了训练时间,可以实现多种动作,包括攀爬、跳跃、穿越各种地形以及在平坦地形上的运动。实验提出的地形引导奖励方法提高了四足机器人的跳跃性能,稳定高速的高程图生成框架减小了仿真与现实的差距。 标题:SF-TIM: A Simple Framework for Enhancing Quadrupedal Robot Jumping Agility by Combining Terrain Imagination and Measurement 链接:https://flysoaryun.github.io/SF-TIM/
打开封面
下载高清视频
观看高清视频
视频下载器
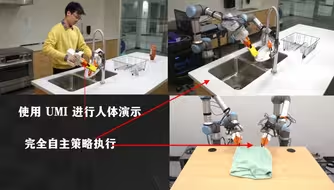
斯坦福大学提出了通用操纵界面(UMI)一种数据收集和策略学习框架,可将人类演示的技能直接转移到可部署的机器人策略中。
重新定义自动驾驶的动态视觉?谷歌提出几何优先的动态场景方法MonST3R
Nature 智能机器'24-7-封面,使用强化学习和生成预训练AI模型,举一反三,实现四足机器人逼真的敏捷性和游戏性!
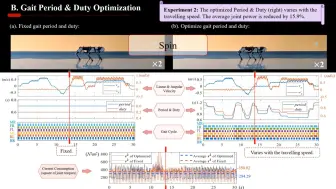
上海交通大学高峰教授团队:六足机器人步态优化框架,让足式机器人像哺乳动物一样行走
UCSD、MIT华人团队开源Open-TeleVision:沉浸式体验跨越3000里的机器人远程操作。
RSS'24满分论文 | ATM框架 无需大量标注,让机器人 从视频学习变得简单高效
国内首个完成梅花桩复杂挑战的四足机器人!
Qwen大模型本地部署教程!教你本地微调一个法律大模型,无需GPU,只要5G内存!附安装包和微调文档!
清华叉院、理想提出DriveVLM,视觉大语言模型与自动驾驶融合,以提升自动驾驶能力
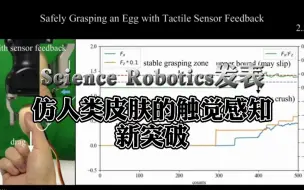
突破!《Science Robotics》:机器人触觉传感器的自解耦和超分辨率
ECCV'24 Oral | 王东林团队提出PiTe:时空对齐视频大模型,增强视频语义理解,提升视频语言模型性能!
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
第一个利用GPT-4V在现实场景中进行开放式推理和自适应规划的闭环框架: COME-robot
IsaacLab交流群及文档更新说明
2024 IROS QRC(四足机器人挑战赛)浙大机器人队自主导航运动
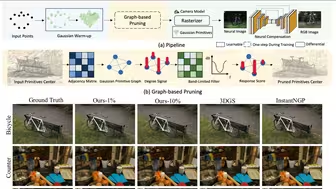
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
ECCV'24 | JHU提出无需SfM的X光3DGS技术: X-Gaussian,使得X射线新视图合成推理速度提升73倍!
NeurlPS'24开源 | GaussianCube 一种用于三维生成建模的结构化和 显式辐射表示,引领三维重建新范式
多模态响应与功能集成,华中科技大学微型磁控胶囊机器人登上《Nature Communications》
【毕业设计开源】机器人全栈开发,四足机器人系统设计【优秀毕设】
育碧最新AI辅助技术,音频可直接驱动NPC自由行动
移动机器人运动规划方法分类
CVPR'24 Highlight 北大 | 扩展动态人景交互建模新突破, 生成的动作质量均优于现有技术
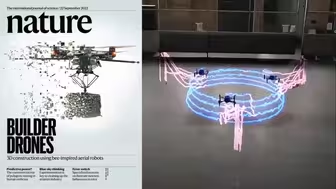
Nature | 像蜜蜂筑巢一样 多无人机协同进行航空增 材制造,实现高精度3D打印
强化学习训练8小时,AI学会了通关益智解谜游戏
依托自研关节电机组件的机器人,可实现载人行走。四足狗售价3.9万,关节电机售价2499。
来自Meta团队的SceneScript,LLM赋能“3D场景重建”,引爆你的AR/VR等应用体验,惊艳效果超越你的想象!
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
ECCV'24 NVIDIA | DiPIR:堪称"变色龙",可将3D物体无缝融合进各种场景,提升视觉真实感
ETH提出基于学习的四足机器人爬梯子控制方法 | 附论文
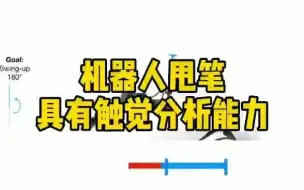
IROS 2020【最佳论文奖】机器人也能“甩笔”,拥有触觉分析能力
只需半天就能搞定的【时间序列预测任务】项目实战,华理博士精讲LSTM、Informer、ARIMA模型、Pandas、股票预测,学不会UP主下跪!附课件+源码
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
神奇的货架机器人Squid,在不改变现有货架布局的前提下可以低成本部署,能代替人工和叉车,可以有效的降低成本,能极大的提高仓库的空间利用率。#机器人
多传感器融合感知
【全463集】禁止自学走弯路!回归算法、聚类算法、决策树、随机森林、神经网络、贝叶斯算法、支持向量机等十大机器学习算法一口气学完!
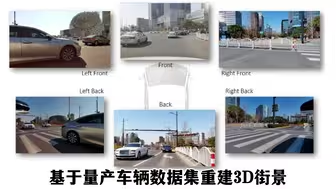
T-ITS | 秦通团队 Crowd-Sourced NeRF: 基于量产车辆数据集重建3D街景
为应对不确定性问题,提出的框架VADv2:通过概率规划实现端到端矢量化自动驾驶