V
主页
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
发布人
SlideSLAM是由宾大研发的新型度量语义SLAM系统,专为异构机器人团队设计,无需GPS即可实现实时去中心化自主导航。系统采用分层地图抽象,包括地标、点云和体素地图,优化了语义信息的存储与处理。实验显示,该系统在多种环境中表现出高效性与鲁棒性。 标题:SlideSLAM: Sparse, Lightweight, Decentralized Metric-Semantic SLAM for Multi-Robot Navigation 链接:https://arxiv.org/abs/2406.17249
打开封面
下载高清视频
观看高清视频
视频下载器
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
《Nature》刊发北航重磅成果!Nature、Science首页共同推荐!北航 | CoulombFly:超轻微型飞行器的太阳能持续飞行
我国高校今年发表的五篇关于无人机的创新性研究成果,每篇都是被顶刊录入的存在!
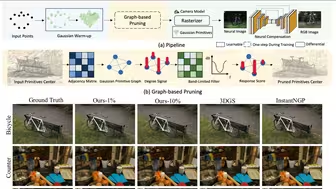
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
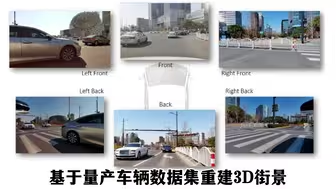
T-ITS | 秦通团队 Crowd-Sourced NeRF: 基于量产车辆数据集重建3D街景
2021 高翔:视觉SLAM基础
无人机集群的去中心化和分布式状态估计和协同定位与建图-徐浩/香港科技大学博士
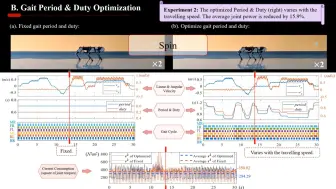
上海交通大学高峰教授团队:六足机器人步态优化框架,让足式机器人像哺乳动物一样行走
第一个利用GPT-4V在现实场景中进行开放式推理和自适应规划的闭环框架: COME-robot
MIT提出最新时空语义SLAM框架:Khronos
[IROS2024] I2EKF-LO:A Dual-Iteration Extended Kalman Filter Based LiDAR Odometry
机器人顶级期刊RA-L2023年 Best Paper "H2 Mapping:使用 分层混合表示的实时密集建图"
首个关于NeRF与3DGS如何重塑SLAM的最新综述,旨在为初学者和资深专家提供重要的指南
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统
上海交大邹丹平团队的最新开源力作,Ground-Fusion:一种对极端情况具有鲁棒性的低成本地面 SLAM 系统。
视觉惯性-压力SLAM:水下考古遗址在线稠密三维重建
ICRA 2024 最佳学生论文奖 | NoMaD:基于Transformer用于 导航和探索的目标掩蔽扩散策略
高翔SLAM报告:开阔高动态区域的激光融合定位
果蝇无人机?用翅膀飞起来的无人机来了!
DiffTF:基于Transformer的大词汇量高质量 3D 物体生成框架,能够实现具有高度多样性、丰富语义和高质量的大词汇量3D物体生成。
一款面向无人机领域相关专业应用研究和二次开发的中小型自主智能无人机平台:问天L240自主智能无人机实验平台
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
来自中国科学院自动化所的团队,首次提出了一种名为 Drive-WM的全新多视图世界模型
宇树Go2 Pro 机器狗正在绘制其环境地图 | Unitree 4D 激光雷达 #机器人视觉
【免费】自动驾驶仿真实践:Apollo&CARLA联合仿真: L1 Apollo架构
机器人革命来了!法国开源“模块化人形机器人”Reachy!
视觉SLAM开源代码论文带读(DSO)
基于3D高斯渲染技术的高速稠密建图:SplaTAM
图森未来在重卡自动驾驶的最新落地与实践 | 王乃岩
ICLR'24|GLiDE:通过反事 实扰动将语言计划植入演示,MIT让机器人掌握"常识",自主完成复杂家务
SLAM算法(浙软夏令营)废柴大学生的所作所为
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
NeRF在机器人技术中 应用的最新综述,旨在为 该领域提供重要参考指南
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
ISMAR 2020【最佳论文】商汤提出手机端实时单目三维重建系统!
DeepMind训练AI踢足球,技术精湛堪比真人
Agile But Safe框架助力四足机器人敏捷性大幅提升,速度与安全兼备!
第十一期智能无人机线下实训精彩回顾
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping(Demo 02)
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建