V
主页
【ICRA2021】3516-BADGR:一种基于自主自我监督学习的导航系统
发布人
移动机器人导航通常被视为一个几何问题,其中机器人的目标是感知环境的几何形状,以便规划通往预期目标的无碰撞路径。然而,对于许多导航问题来说,纯粹的几何视图可能是不够的。例如,一个基于几何图形导航的机器人可能会避开一片高高的草地,因为它认为这片草地是不可穿越的,因此将无法达到预期的目标。在这项工作中,我们研究如何超越这些纯粹基于几何的方法,使用一种从经验中学习物理导航可见性的方法。我们将强化学习方法称为BADGR,这是一种基于端到端学习的移动机器人导航系统
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
【人物访谈】10月29日,马斯克接受访谈:AI能力每年至少增长10倍,2028年左右具备所有人类的综合能力|2024.10.29
难怪那么多人骂高德地图缺德,但还是有那么多人用
打造地表最强个人网站,博客、导航、看电影、追剧、听歌、素材管理,一站搞定!
摇啊摇,跳啊跳,手持slam第一人称视角
利用大语言模型增强机器人导航(ReMEmbR)
比亚迪百度车机版V20.8.1可小迪语音
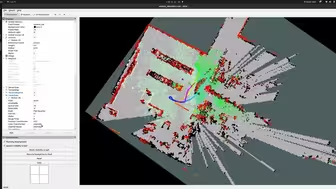
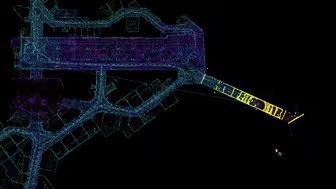
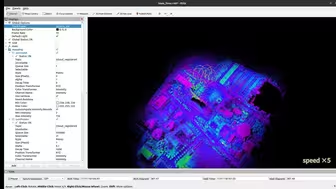
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【SLAM】【空间计算】RoboBaton系列产品正式亮相【三维重建】【AI赋能】
17岁的天才高中生
Go2开发教学10-SLAM 导航服务接口
开车用手机导航,记得打开这5个设置,能让你少走很多冤枉路
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示
fastlio建图与自主导航演示
自动驾驶入门技术全栈实战解析-1-感知篇
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
地狱级憋笑挑战!扫地机器人突然“自毁了?爆笑发明真太实用了
无人机搭载livox avia采集点云数据,rosbag记录数据,FAST-LIO建图
【SLAM】LoopSplats:通过直接的3DGS注册,实现密集建图和在线回环检测的全局一致性图优化
轮足机器人|平衡步兵动态障碍物导航避障
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
你创造除了第一天生反骨的人工智能
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
大型纪录片《缺德地图传奇》持续为您播出
北斗博士胎教音乐《社会主义好》
压缩感知和消息传递
n年前发在猿辅导上的scratch3D
【放松解压】AI生成猫咪烹饪意大利面 | 作者:Cat Chef's Cooking
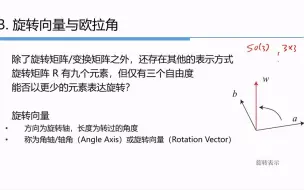
2-3 旋转向量和欧拉角
【SLAM】高翔-视觉SLAM十四讲 配套视频
【浙大谭平】从相机标定到视觉SLAM
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
概率机器人
强推!这可能是B站最全的(Python+Transformer+大模型)系列课程了,堪称AI大模型系列课程的巅峰之作!-人工智能/提示词工程/RAG/大模型微调
尤瓦尔·赫拉利对谈张静初:AI正在制造慢不下来的人
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
【StableDiffusion】2024最细最保姆SD全套教程!零基础入门到精通,全程干货无废话!逼自己一个周学完,允许白嫖,拿走不谢,AI绘画 AI商业