V
主页
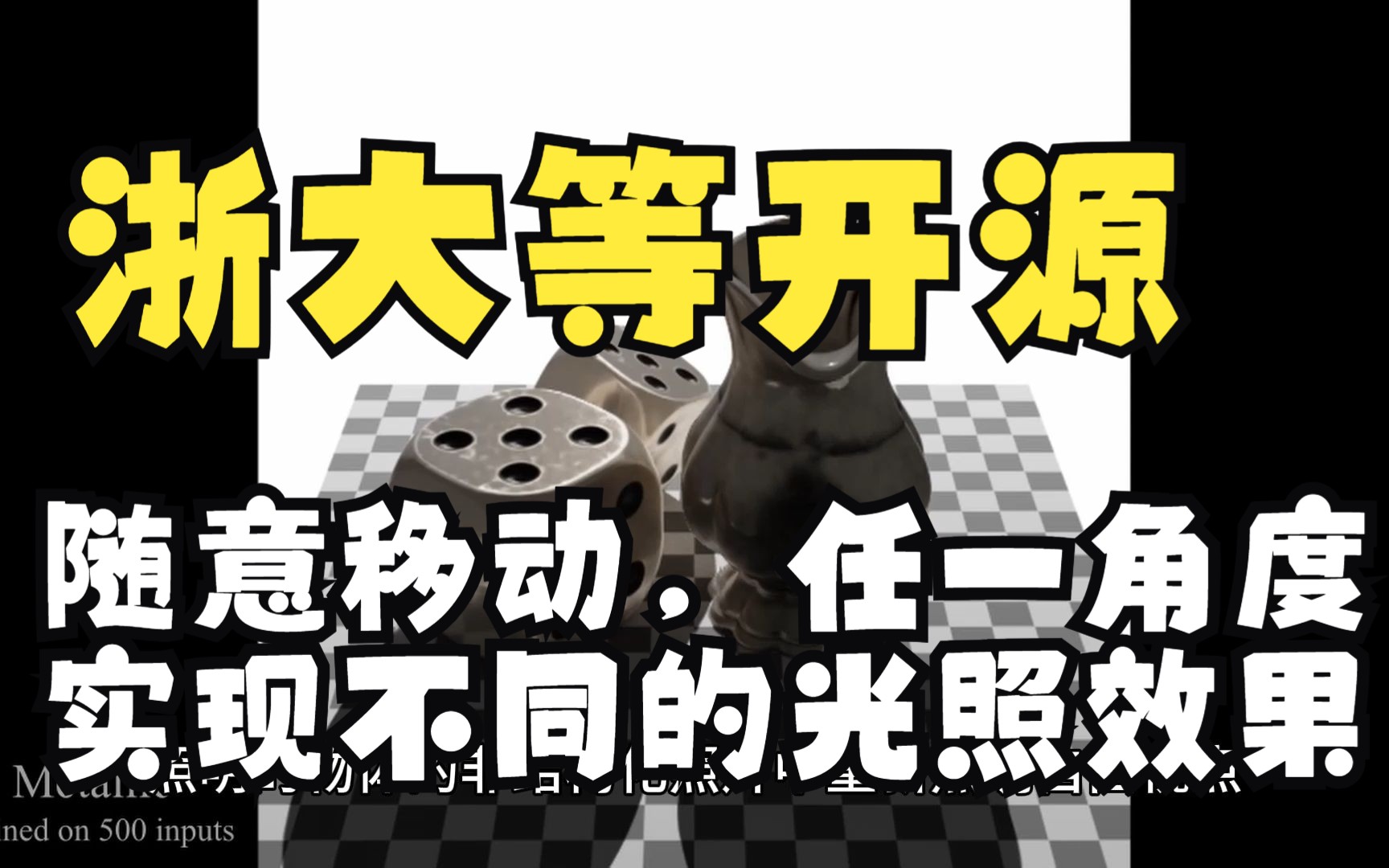
浙大&微软等新开源|随意移动,任一角度实现不同的光照效果!SIGGRAPH 2023
发布人
本文提出了一种新的神经隐式辐射表示方法,用于从一小组由不同于视图位置的移动点光源照明的物体的非结构化照片中重新照明自由视点。我们将形状表示为由多层感知器建模的带符号距离函数。与之前的可重新照明的隐式神经表示相反,我们没有解开不同的反射率分量,而是通过第二个多层感知器对每个点的局部和全局反射率进行建模,除了密度特征外,该感知器还包括当前位置、法线(来自有符号的远距函数)、视角方向和光线位置,还采用阴影和高亮提示来帮助网络对相应的高频光传输效果进行建模。 项目主页:https://nrhints.github.io/ 论文地址:https://nrhints.github.io/pdfs/nrhints-sig23.pdf 代码地址:https://github.com/iamNCJ/NRHints
打开封面
下载高清视频
观看高清视频
视频下载器
无外部设备下,可实现厘米级自主规避!港科大&大疆新开源!
SIGGRAPH 2022|通过步态就能识别身体疾病,好神奇!
【IROS2022】港科大&大疆即将开源|短时间生成高质量三维稀疏拓扑骨架图,移动机器人的全局规划!
ICRA2022|浙大&商汤等发布紧耦合RGB-D视觉惯性VIP-SLAM,速度快2倍!
AR可以自动编故事了?输入故事即可转换为图形画面!GMU等发布,SIGGRAPH 2022!
【即将开源】换头技术,它又双叒叕来了!比比哪家强?华南理工&百度最新研究HeSer实现动态换头!CVPR2022
西湖大学&浙大新开源|BAD-NeRF的捆绑调整技术,实现去模糊和恢复摄像机运动轨迹!CVPR2023
SIGGRAPH 2022|需6个视图,即可重建渲染动作!上科大,最新开源!
深度学习特征实现机器人长期视觉定位,白天夜里什么光照都hold住!ICRA/RAL 2022
提升代码能力!直接抄她的代码,就是最好的学习方法
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
【喂饭教程】8分钟学会微调大模型Qwen2,环境配置+模型微调+模型部署+效果展示详细教程!草履虫都能学会~
上科大与中科院联合开源!捕获情境环境中的多人多物交互
100+小时,45000m²的覆盖面积!首个用于AR的定位和建图基准!ETHZ等新开源,ECCV2022!
哈工大、清华联合开源GPS-Gaussian:可泛化的像素级三维高斯溅射,实时人体新视图合成
这些知名开源社区为什么被吐槽?但还有人在用??
开源!AI的移花接木大法!不止能“换头”!
南洋理工新开源|高保真、低成本!实现超分辨率图像重建!
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!
【4K 10bit】巫师次世代——(还原2014年37分钟的清晰阴影效果)和(2013年VGX美术光照系统包括材质效果)
这不是CG!任意视角下均可互动,实时渲染逼真的驾驶场景!浙大最新开源,AAAI2023!
阿里二面:MySQL大规模数据查询是否会内存溢出???给我问懵了。。。
ECCV2022|任意两帧之间均可插入,可实现27倍视频加速处理!旷视等最新开源
【CMU开源】数千美元的设备即可提供百万美元级的地图质量!无GPS下,高精度地图合并!
好神奇,一键即可变笑脸!面部、眼睛、嘴和头发均可任意改变!最新开源!
阿里二面:说说SpringBoot的启动原理?你知道SpringBoot项目是如何启动的吗???问倒一大片!
CMU最新发布首个记忆增强的终身SLAM系统,源自大脑中记忆重放机制的启发!
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
北航小姐姐带你精读SLAM综述论文
ICRA2022|CMU动态视觉SLAM新思路!用移动对象来改进相机姿态估计,绝绝子!
GraphRAG实现解读【上篇 - 写入】
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
仅需3张图像即可合成逼真新视图,学习NeRF并优化相机姿态!ETHZ&Google等开源,CVPR2023
Excel放大招,AI+Python来了
【开源】基于激光点云的无监督类无关实例分割算法,RAL22!
RGBD稠密重建开山之作-KinectFusionLib代码解析(下)
从头开始教你用VSCode开发Python程序!
ETH、斯坦福与微软联合开源数据集!大几何和时间变化下的三维点云配准的时空基准
【最新开源】ECCV 2022|基于事件的光流估计,无监督法排名第一!庆应大学&柏林工大新研究
MIT|未知环境下,3D场景图的压缩!压缩率高达78%!可满足通信预算限制!