V
主页
ICRA2022|CMU动态视觉SLAM新思路!用移动对象来改进相机姿态估计,绝绝子!
发布人
在本文中,我们介绍了一种动态对象感知slam系统,许多动态slam算法将动态对象视为异常值,但在高度动态的城市环境中,如spya移动对象覆盖了很大的视野,这就介绍了我们在本文中主要的问题,我们可以利用视觉slam中的移动对象来改进相机姿态估计,而不是过滤掉它们,我们将城市环境中最常见的动态对象建模为连接对象修正关节性对象模型我们引入刚性约束,该约束假设在同一身体部位上的点的纯距离随时间保持不变,引入刚性约束的好处有两方面:一是它为动态点提供了一个时间几何约束,可以纠正动态对象的尺度和三维结构;二是它提供了一个几何检查,可以消除动态对象中的不正确匹配点。 论文地址:https://arxiv.org/abs/2109.09903
打开封面
下载高清视频
观看高清视频
视频下载器
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学
【六哥答疑】多传感器融合SLAM都有哪些框架?作为研究生课题研究方向如何?
【最新开源】ECCV 2022|基于事件的光流估计,无监督法排名第一!庆应大学&柏林工大新研究
【六哥答疑】多传感器融合SLAM如何开始研究呢?有哪些研究方向?
【最新开源】ECCV2022|美女秀发随风飘动,发丝抠图一点不差!延世大学&Adobe新研究
【最新开源】ECCV2022|清华用单目RGB视频实现人体捕捉3D重建!
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(上)
街舞动作捕捉!南洋理工最新开源,ECCV2022!
【直播回放】在读博士从头手写VIO代码的经历分享
【六哥答疑】研0小白在哪里找最新的SLAM论文呢?
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
【原创】优秀开源代码盘点:稀疏视觉SLAM/SfM
【六哥答疑】SLAM的评估指标都有哪些?
ICRA2022|最小化成本,无特征环境下仍能估计轨迹!全局一致和紧耦合的3D激光惯性建图!
CVPR2022|马里兰大学新发布,直接可微相机姿态估计端到端网络!
CMU & ICRA 2022 SLAM竞赛介绍及交流 “UGV大场景3D点云定位”和“UAV俯瞰视觉定位”
【CMU开源】数千美元的设备即可提供百万美元级的地图质量!无GPS下,高精度地图合并!
【最新开源】ECCV2022|小姐姐活灵活现,将单视图语义转换为NeRF!莫纳什大学&南洋理工最新发布
ICRA 2022盘点:SLAM方向十大重点论文解读
【SLAM前沿讲座】CMU|因子图与鲁棒感知
ECCV2022|多目标检测+纹理重建+6D目标位姿+尺度估计!佐治亚理工&丰田最新发布
苏黎世皇家理工等发布!带闭环稠密神经SLAM
MIT|仅用RGB相机作传感器,实时定位机器人!无需依赖初始姿势估计!
【开源】LLOL:旋转激光雷达的低延迟里程计法|宾夕法尼亚大学
【六哥答疑】优秀的开源SLAM算法离落地还有多远?
就离谱!一键抠图,是时候和PS说拜拜了,超强发丝级抠图算法重磅开源!可在线试玩
上海交大最新开源|GNSS/INS/Camera融合导航库GICI-LIB
手把手带你入门SLAM
大疆livox-mid360定位
【最新开源】单目RGB视频就可重建出会动的4D仙人掌玩具!
【直播回放】一个本科生从小白到菜鸟的SLAM进阶之路
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——鲁棒性强】“实测”
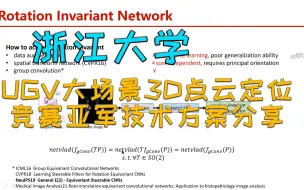
CMU & ICRA22 UGV大场景3D点云定位竞赛亚军技术方案分享|浙江大学
SLAM入门简介及ORB-SLAM2论文精讲
学习SLAM,必读哪些基础书籍?
深度学习特征实现机器人长期视觉定位,白天夜里什么光照都hold住!ICRA/RAL 2022
ICRA22大牛直播回放 | 提高深度神经网络分类器对语义转换的可信鲁棒性
SLAM初学者常问的几个问题