V
主页
这不是CG!任意视角下均可互动,实时渲染逼真的驾驶场景!浙大最新开源,AAAI2023!
发布人
https://www.youtube.com/watch?v=qf0JDgJ-hns 合成自由视图照片真实图像是多媒体中的一项重要任务。随着高级驾驶员辅助系统(ADAS)及其在自动驾驶汽车中的应用的发展,对不同场景进行试验成为一项挑战。尽管照片真实的街道场景可以通过图像到图像的转换方法合成,但由于缺乏3D信息,这种方法无法生成连贯的场景。本文提出了一种大规模神经渲染方法来合成自动驾驶场景(READ),这使得通过多种采样方案在PC上合成大规模驾驶场景成为可能。为了表示驾驶场景,他们建议𝜔 − 𝑛𝑒𝑡 渲染网络以从稀疏点云学习神经描述符。他们的模型不仅可以合成真实的驾驶场景,还可以缝合和编辑驾驶场景。实验表明,他们的模型在大规模驾驶场景中表现良好。 论文地址:https://arxiv.org/abs/2205.05509 代码地址:https://github.com/JOP-Lee/READ
打开封面
下载高清视频
观看高清视频
视频下载器
【智驾系列7】自动驾驶为啥都不用高精地图了?
用于自动驾驶的模拟器,可实时模拟复杂的驾驶情况!MIT开源!
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
华科、华为联合开源!实时动态场景4D高斯泼溅,最高 82fps!
开源!AI的移花接木大法!不止能“换头”!
最新开源|支持惯性、激光雷达、双目和RGB-D传感器的系统!
清华最新开源:植被地形下轮式机器人的自主导航(附PPT!)
2021年度盘点:十大最佳开源SLAM算法!
立体匹配算法原理与应用-奥比中光
港中大最新开源|2D秒变3D,基于2D场景风格化的光线配准!CVPR2023
牛津大学丨用于机器人安全导航的控制器丨[RA-L]
【最新开源】动手P图太麻烦?NTU、港中大推出对话美颜系统!
西湖大学&浙大新开源|BAD-NeRF的捆绑调整技术,实现去模糊和恢复摄像机运动轨迹!CVPR2023
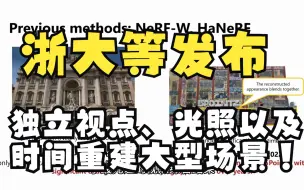
好真实!以独立视点、光照以及时间重建大型场景!浙大&康奈尔大学新发布, CVPR2023
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
如何更高效学习GNSS、RTK定位?(含30+论文及两本电子书下载)!
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(下)
有效处理遮挡、反光等问题,接近实时的三维重建!英伟达即将开源,CVPR2023!
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
手把手教你编译运行VINS代码
【开源】ETH&微软提出:三维场景中的4D人体捕捉,抖动大幅减少!ICCV2021
CMU & ICRA 2022 SLAM竞赛介绍及交流 “UGV大场景3D点云定位”和“UAV俯瞰视觉定位”
【直播回放】专门用于自动驾驶的LiDAR惯导标定方案
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!
浙大&Google最新发布|RGB图像引导下的基于轻量ToF传感器的深度估计!ECCV2022!
哈工大、清华联合开源GPS-Gaussian:可泛化的像素级三维高斯溅射,实时人体新视图合成
太酷了!手持激光雷达,即可在线实时重建点云!牛津大学最新发布,可用于森林调查!
三维感知图像生成丨清华&微软&中科大提出GRAM方法
浙大章国峰团队发布CP-SLAM: 协同基于神经点的SLAM
【线下讲座】邹镇洪:科研小白如何入门自动驾驶?
仅需73ms即可重建一帧,无需3D卷积的3D重建!UCL等最新开源,ECCV2022!
2022年度盘点:十大最佳SLAM开源算法
照片转动漫,原来二次元的冰冰长这样!可试玩!开源!
3800公里智驾之旅第1天!蔚来ET5自动泊车、自动换电,高速自动驾驶,真香!!!
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
浙大&阿里等发布|好强!MirrorNeRF准确还原镜子中的多视角反射!
仅需一张图片和音频,一键即可控制说话风格!清华最新发布,AAAI2023!
ICRA2021最新开源!基于泊松三维重建的激光雷达里程计和建图!
如何快速入门三维重建?应用场景、岗位要求及薪资、技术框架