V
主页
机器人控制,自动控制的本质下,把握本质能够快速解决问题
发布人
机器人控制系列第二篇下,自动控制的本质
打开封面
下载高清视频
观看高清视频
视频下载器
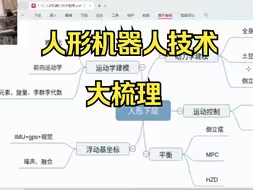
梳理人形机器人——底层技术
机器人控制,自动控制的本质,把握本质才能解决问题的
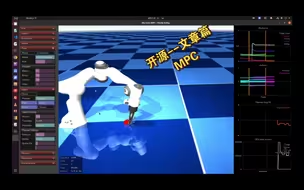
【开源软件-文章篇】MPC控制,有机械狗、机器人、机械臂、倒立摆的模型,非常方便大家学习控制和机器人技术,推荐给大家用
运动学、动力学Matlab代码,Roy Featherstone开源的程序,还有russ tedrake教授的研究,可以参考他们的来写
通俗易懂,入门非线性控制,通过几何思维看控制系统
机器人控制前言,不要再花时间调参数了,理论结合实践才能出产品
好理解 优化控制LQR,黎卡提方程,哈密顿函数
经验|机器人开发怎么 “ 高效” 调参数,大家都有痛苦的调参经历
人形机器人,强化学习sim 2 sim,humanoid gym 训练方法
机器人中的雅可比矩阵,概念很简单,建议大家直接用现成的公式
cassie强化学习文章简单讲解
【开源软件】MPC控制,有机械狗、机器人、机械臂、倒立摆的模型,非常方便大家学习控制和机器人技术的,推荐给大家使用
55个非常有意思的“机器人”网站,从几千个网址里筛选出来的
机器人入门系列--七,怎么入门机器人
通俗理解 , 李亚普洛夫稳定
经验|机器人技术,为什么看不懂论文
机器人控制,特征根与系统稳定性
写了一个人形机器人仿真,适用5或者6自由度的腿形
人形机器人MPC控制案例
经验|怎么轻松获取免费的学习资源
算法工程师说机器人结构
经验|研究机器人,不要面面俱到
公开课--基于优化的机器人控制,机器人建模基础(1)
经验|做过比赛有好处,但也有不足之处
开发机器人的第一件事——怎么写机器人的安全模块
经验|做技术,确定方向,少走弯路
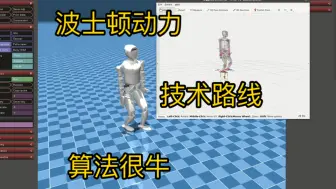
终于走上波士顿动力的技术路线了,算法很强,软件很难调。ocs2质心动力学MPC+WBC,6自由度的腿也调好了,加上了碰撞约束,参数还没细调,能够行走1m/s多。
就业|足式机器人方向的就业,有些人一身高超武艺却无处施展
预见未来,大模型与机器人将极大的增加机器人的智能,更强的知识表达能力,能够处理多模型信息@transformer
四个必须要知道的自动化机器学习库,能帮你节省大量炼丹时间,尤其是最后一个!
控制中的场论
122集付费!CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络一口气全部学完!
机器人控制,系统品质及稳定性,给产品定指标
怎么让机器人走起来,给宁波大学大三学生的分享
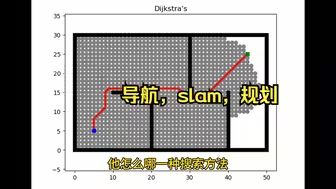
【经验】机器人入门5--导航,slam与规划
【经验】机器人入门系列1--个人经历
自动化控制考研计算器禁用?手算如何处理?手把手教你解决!
【学霸秘籍】2小时精通自动控制原理,1对1辅导揭秘
非线性系统实现全局稳定,反馈线性化
公开课--基于优化的机器人控制(4),ZMP人形机器人步态规划,LIPM线性倒立摆建模,人形机器人行走