V
主页
【经验】机器人入门系列1--个人经历
发布人
针对机器人行业,想要入门和刚入门的经验分享! 机器人职业发展 怎么入门 欢迎提问题,讨论!
打开封面
下载高清视频
观看高清视频
视频下载器
【经验】机器人入门3--就业情况
Whole body MPC 在线实时,只需要 15ms
【经验】机器人入门4--基本概念
今年单子越来越多流水越来越大,没办法只能注册公司,不想把时间浪费在杂事上,一年花3800找了个代记账公司帮我报税交社保。在西安租了一套90平的房子做办公室
【经验】机器人入门2--为什么这么热!
人形机器人,强化学习sim 2 sim,humanoid gym 训练方法
机器人入门系列--七,怎么入门机器人
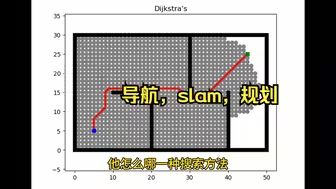
【经验】机器人入门5--导航,slam与规划
写了一个人形机器人仿真,适用5或者6自由度的腿形
简单入门的whole body MPC人形机器人控制
网友搞出世界最小开源端到端人形机器人,极简DIY成本仅2500
开源库,4款人形机器人MPC控制的开源库
经验|做过比赛有好处,但也有不足之处
机器人控制前言,不要再花时间调参数了,理论结合实践才能出产品
就业|足式机器人方向的就业,有些人一身高超武艺却无处施展
经验|做技术,确定方向,少走弯路
【喂饭教程】ollama+FastGPT快速搭建本地知识库,免费、无限制、保护隐私、无需网络~小白入门必看的保姆级教程!
不积跬步,无以至千里;不积小流,无以成江河。再大的目标也要脚踏实地,一步一个脚印去做,不要好高骛远,急功近利……
人类搬运工的终结者?波士顿Atlas机器人自我纠错、自主操作相当惊艳
云深处DR01人形机器人,野外实训,越野性能强大!
耗时一个月,终于把人形机器人技术给突破了,为了积攒创业资金,准备开通咨询和技术合作,有需要可以联系我
RT2 VoxPoser Mobile Aloha…哪条路线更好?
人形机器人强化学习训练方法,为什么腿是直着的?humanoid gym
人模人样----为了让人形机器人走的更像人,设计了一些机器人轨迹,目前只有下半身,展示的是轨迹的可视化
通俗理解 , 李亚普洛夫稳定
公开课--基于优化的机器人控制(3),关节空间控制,逆动力学控制,计算力矩法,反馈线性化,人形机器人
机器人中的雅可比矩阵,概念很简单,建议大家直接用现成的公式
【开源软件-文章篇】MPC控制,有机械狗、机器人、机械臂、倒立摆的模型,非常方便大家学习控制和机器人技术,推荐给大家用
公开课--基于优化的机器人控制(4),ZMP人形机器人步态规划,LIPM线性倒立摆建模,人形机器人行走
小鹏AI人形机器人Iron亮相:62个主动自由度,搭载自研AI芯片和灵巧手,已进厂打工!
稚晖君开源人形机器人智元灵犀X1全套资料
[开源]让我真正领悟到控制的美——复杂多自由度,多任务控制案例,ijrr文章解读与仿真(上)
【ROS2】云深处Lite3户外SLAM
机器人控制论文里常见的矩阵微分
重磅波士顿动力人形机器人Atlas全面进化。从硬件到软件,全面放弃原有的技术路线。接入ML视觉模型后,性能更加强大。
开发机器人的第一件事——怎么写机器人的安全模块
斯坦福炒虾机器人爆火全网!开源的mobile aloha,洗衣做饭移动双臂机器人,直播技术讲解部分录屏
人形机器人MPC控制案例
马斯克的人形机器人到底能否大批量生产
公开课--基于优化的机器人控制(2),机器人建模、接触模型,足式机器人建模方法,人形机器人