V
主页
京东 11.11 红包
IROS 2020【最佳论文奖】机器人也能“甩笔”,拥有触觉分析能力
发布人
机器人顶会 IROS 2020 上,上海交大 & MIT 联合项目 SwingBot 为我们展示了如何让机器人通过触觉传感器来学习感知物体复杂的物理特性,从而完成一个高难度的甩笔任务。 论文链接:http://gelsight.csail.mit.edu/swingbot/IROS2020_SwingBot.pdf 项目地址:http://gelsight.csail.mit.edu/swingbot/
打开封面
下载高清视频
观看高清视频
视频下载器
IROS'24 普渡大学、麻省理工学院 | 5自由度触觉夹持器,性能匹敌仿生手,实现高效精确操控
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
MK-mini砖路沟坎
ACCV 2020 最佳论文奖开源!
【中英精校】走进领先的机器人仓库,Brightpick机器人是全球唯一可以在仓库过道内像人类用手推车一样自动拾取和整合订单的自主移动机器人
移动机器人运动规划
神经网络到底是做什么的?5大经典神经网络(CNN/RNN/GAN/LSTM/Transformer)计算机博士一次带你学明白!简直不要太爽!
『算法可视化』一分钟看懂卷积神经网络
学习机器学习需要哪些基础知识呢?今天一次性给大家说明白!
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
10大与人工智能相关的<顶级会议>,哪些是你的投递首选?这些顶会论文与SCI论文相比如何呢?
李飞飞团队佳作不断:聚焦机器人抓取交互,让机器人操作真正地适应各种环境
国内首个完成梅花桩复杂挑战的四足机器人!
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
Nature | 颠覆传统设计!电动液压肌肉骨骼机器人腿,实现真正意义上的灵活、强适应性的且节能运动!
Research | 受章鱼行为启发 的具有爬行和游泳能力的可脱 离机械臂工作的水下软体抓手
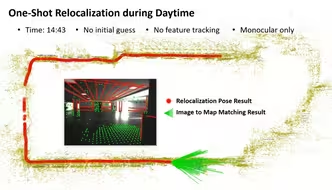
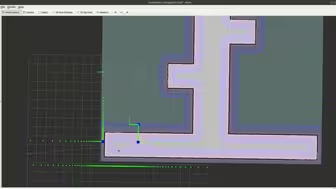
2d slam-移动机器人自主全局重定位展示
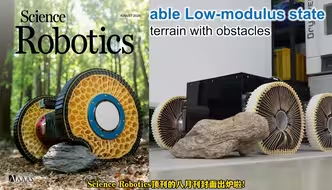
Science Robotics | 从液体表面张力获得灵感,研发出”能屈能伸”的可变刚度车轮
KAN原论文作者转发点赞!KAN取代transformer中的MLP层,以增强模型的表达能力和性能。
2024最新即插即用卷积模块MSPANet打败Resnet、SE、CBAM,CNN框架模型涨点!
精品直播 | 移动机器人行业人才需求的变与不变
NeurlPS'24开源 | RealMotion捕捉时空交互关系,为自动驾驶提供连续、精准的运动预测
2021 高翔:视觉SLAM基础
【珍藏视频】今天的卷积网络,Yann LeCun在93年就已经玩得很溜了
基于CNN和OpenCV的小猿口算脚本实现6秒写10道题
B站居然没人讲?移动机器人和量产自动驾驶的区别与联系
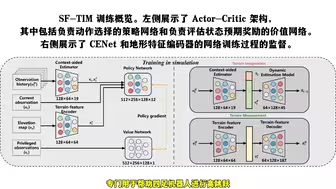
成功部署,敏捷度直接翻倍!浙大提出辅助四足机器人的跳跃新框架SF-TIM,敏捷度直接翻倍
nuPlan:世界上首个现实世界自动驾驶数据集和基准,旨在测试基于机器学习的规划器处理各种驾驶场景以及做出安全且高效决策的能力
提升四足机器人各种地形运动适应性的方法DTC(深度跟踪控制)
【硬核】卷积到底在卷什么?读书卷,工作卷,函数也卷|卷积入门学习|卷积神经网络|信号与系统【喵星考拉】
当机器人遇到遮挡:IROS'24最新佳作揭秘「如何在视觉盲区保持精准人体追踪
35篇最值得读的图神经网络经典论文
移动 ALOHA ,学习低成本全身远程操作的双手移动操作
双色球科学选号,概率更高,看完视频马上成为老彩民,别听“砖家”信口开河,只看数据概率
深度三维感知:数据、学习架构与应用
【揭秘】波士顿动力如何打造地表最强机器人!
基于深度学习的三维重建与位姿估计系统设计 | 孙佳明
按照国家自动化学会的标准,哪些车企的自动化能力是等级最高的