V
主页
京东 11.11 红包
视觉SLAM开源代码论文带读(DSO)
发布人
欢迎加入深蓝学院SLAM技术交流群,与大佬一起交流更多! 感兴趣的同学可以点击下方链接添加我们的工作人员领取海量人工智能领域学习资料,还有诸多领域交流群可以选择哦~ https://www.shenlanxueyuan.com/launch/B0186/detail
打开封面
下载高清视频
观看高清视频
视频下载器
基于三维点云场景的语义及实例分割
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
视觉SLAMVIO开源代码解析-DSO
SLAM-Viewer,SLAM便捷可视化小工具
AR光波导的应用与发展 | 郑昱
三维重建入门到精通,30分钟教你学会运动恢复结构SFM
高翔SLAM报告:开阔高动态区域的激光融合定位
移动机器人运动规划方法分类
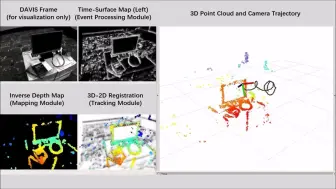
港科大沈劭劼组最新开源:双目事件相机视觉里程计!
点云上的卷积神经网络及其部分应用
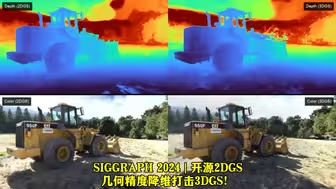
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
无视干扰,谷歌开源SpotlessSplats:3D场景重建中的干扰物识别与排除
SA-GS:在3D高斯抛雪球中实现SAM任意物体分割,无需任何训练过程和学习参数,通过交互式过程实现3D高斯抛雪球物体分割
终于有人把三维点云与三维重建讲得如此简单了!算法解读、项目实战、论文解读、环境配置
自主机器人技术线上研讨会第一期:嘉宾仲星光,报告:基于隐式神经表示的LiDAR SLAM
基于3D高斯渲染技术的高速稠密建图:SplaTAM
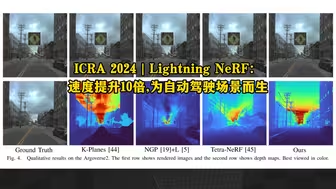
ICRA 2024|Lightning NeRF:速度提升10倍!为自动驾驶场景而生
DiffTF:基于Transformer的大词汇量高质量 3D 物体生成框架,能够实现具有高度多样性、丰富语义和高质量的大词汇量3D物体生成。
基于深度学习的三维重建与位姿估计系统设计 | 孙佳明
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
2021 高翔:视觉SLAM基础
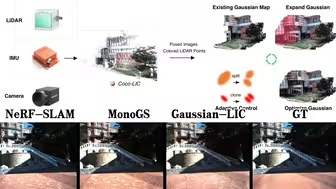
浙大TUM联合出品|Gaussian-LIC:首个LiDAR-IMU-Camera融合的3DGS-SLAM系统
AR与计算机视觉技术 | 吴克艰
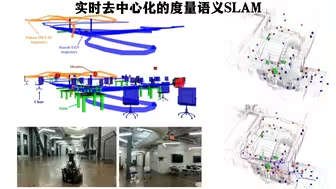
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
CVPR'24 满分Oral | EscherNet 实现任意视角灵活扩散生成 解锁3D视觉无限可能!
NeurlPS'24开源 | GaussianCube 一种用于三维生成建模的结构化和 显式辐射表示,引领三维重建新范式
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
SLAM在自动驾驶中的应用: AVP-SLAM和众包构图 & 非惯性系下VIO探索 | 秦通
SLAM在机器人与自动驾驶领域的从业探讨 | 圆桌论坛
激光雷达点云采集原理以及在自动驾驶中的应用(中文字幕)
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
基于点云场景的三维物体检测算法及应用
果蝇无人机?用翅膀飞起来的无人机来了!
3D Gaussian Splatting再进化,即使是模糊的图像也可以渲染出高保真的3D场景了。
UCSD、MIT华人团队开源Open-TeleVision:沉浸式体验跨越3000里的机器人远程操作。
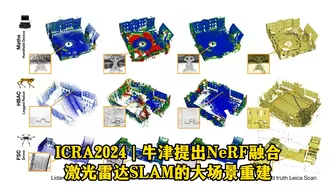
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统
北大 | 文本驱动、全景世界文生3D全景世界大模型为元宇宙和VR带来新机遇
计算机视觉最不卷的方向:三维重建学习路线梳理
BEVFormer一作分享,基于时空融合的BEV感知”
【高清中文】ORB_SLAM2源码解析