V
主页
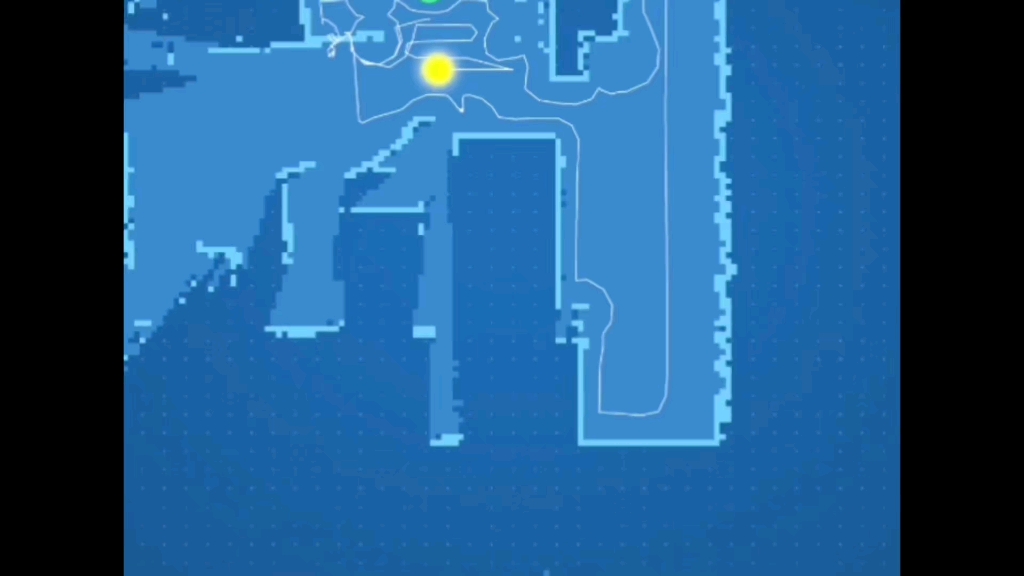
扫地机器人建图过程
发布人
扫地机器人建图过程。主演:小米扫地机器人。
打开封面
下载高清视频
观看高清视频
视频下载器
长安深蓝SL03智能网联汽车实训平台介绍
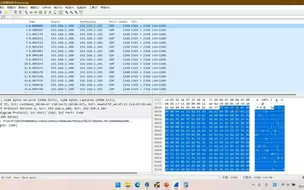
使用WireShark读取激光雷达数据
An Efficient Tightly-Coupled LiDAR-Inertial Odometry via Single-Iteration IEKF
神经辐射场照亮动态SLAM:构建精细场景地图
为什么妈妈们更喜欢洗地机而不是扫地机器人?
SLAM算法(浙软夏令营)废柴大学生的所作所为
【北理】结课作业——ROS小车记录
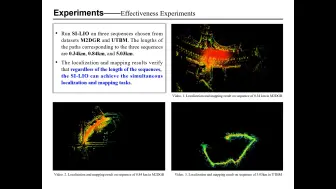
[IROS2024] I2EKF-LO:A Dual-Iteration Extended Kalman Filter Based LiDAR Odometry
反光柱SLAM
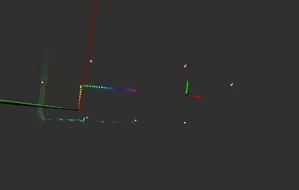
如何在Jetson Nano上实现3D激光雷达的A-LOAM建图算法
扫地机器人,如何割韭菜
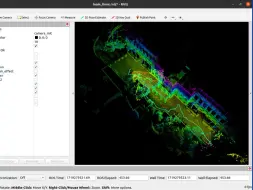
2024.6.25-激光SLAM:Faster-Lio 算法编译与测试
复杂环境下3D激光SLAM系统研究
无需SLAM算法,直接生成Gazebo仿真环境对应的高质量真值地图的工具 pgm_map_creator,手把手逐步详细讲解安装部署和使用方法【开源】
吹爆!这可能是导师都不讲的自动驾驶最新版教程,不愧是北航硕士团队分享!3小时就带我跑通了自动驾驶感知融合实战!简直比刷剧还爽!
【雷达-相机协同定位】LiDAR-Vision Tightly Coupled Collaborative Positioning
真正可用!灵光Lixel的实时点云有多靠谱?|手持激光雷达手持slam
买前必看!扫地机器人6个月深度体验,我后悔了吗?
无恰饭真体验:如何花139,实现官方699的自动上下水功能?
#三维激光扫描#SLAM移动三维激光扫描仪#手持激光雷达,古镇三维数字化保护
巨大的猫猫和扫地机器人
云鲸逍遥001 ,第三次拍开箱视频
[RA-L2023] CamMap:基于SLAM地图对齐方式的非重叠视场相机的外参标定
扫地机器人产品三维动画视频
强烈推荐!东南大学无人驾驶智能汽车技术全套教程!终于找到的精品公开课!存下吧,比啃书好多了!—卡尔曼滤波、激光雷达、目标检测、感知技术、神经网络、路径规划
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping(Demo 02)
【正面视角】5岁中国少年朱修远以2.942秒的成绩打破[4×5华容道]兵分三路布局WRCA世界纪录 使用魔域三国华容道!
SLAM导弹:防区外精准打击|F/A-18C
FPGA实现固态激光雷达,据说这个玩透年薪百万
科沃斯扫地机器人原地转圈圈维修技巧
2025工创赛重拳出击
昨天试驾了昊铂GT 24款激光雷达版,无图NDA也很牛逼,接近昊铂HT的24款智驾水平,没有高精地图的乡间小路一样老溜了。
无恰饭唠体验:扫地机终极性价比折腾经历
2024扫地机!石头G20S 真实测试-1/3
【ICRA 2024】基于分块地图的大场景定位
2024.6.25-基于mid360的无人车系统测试
2024扫地机!石头G20S 真实测试-3/3
新房入住两个月后的感受,我太蠢了,大家千万不要学!
vlog/有娃有猫也能轻松干净,烤羊排绝了!
8个实用电器,不装会后悔❗别等入住才发现❗