V
主页
复杂环境下3D激光SLAM系统研究
发布人
复杂环境下3D激光SLAM系统研究
打开封面
下载高清视频
观看高清视频
视频下载器
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
强推!【SLAM核心算法】中科院博士一口气带你学完无人驾驶:原理、激光、无人机、VR、传感器、计算机视觉!(人工智能、深度学习、机器学习、神经网络、图像处理)
激光slam精度验证,强光环境地面点精度,RTK参数转换大地高转85高,精度验证
【三维重建】pixelGS:像素控制密度的3DGS高斯喷溅
End-to-End视觉里程计新突破:从运动模糊图像中精确估计相机姿态
火速上车,LIO-SAM启动!!
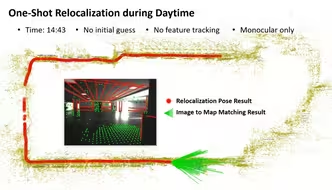
激光SLAM重定位视频1
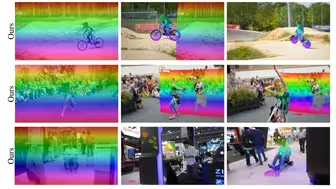
ECCV'24开源 | LocoTrack: 塑造SLAM新纪元!6倍加速! 跟踪一切最新SOTA!
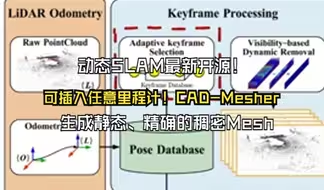
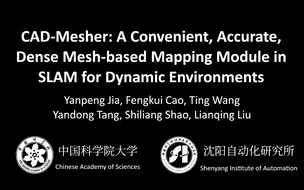
动态SLAM最新开源!可插入任意里程计!CAD-Mesher:生成静态、精确的稠密Mesh!
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——高精度】“实测”
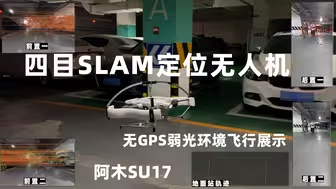
阿木SU17在无GPS弱光环境下依靠四目SLAM定位飞行展示
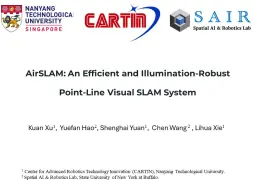
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
TRLO: An Efficient LiDAR Odometry with 3D Dynamic Object Tracking and Removal
滑铁卢大学发布! 迈向实时的高斯平滑:通过光度SLAM加速3DGS
一个简单并没有意义,主要用于展示给参观领导的机械臂视觉点云抓取
激光slam相对坐标精度,科力达slam车库室内操作
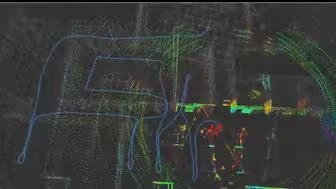
激光雷达实时场景三维重构.👏
激光SLAM的原理,激光雷达有着什么样的作用
强推!【SLAM核心算法】中科院博士一口气带你学完无人驾驶:原理、激光、无人机、VR、传感器、计算机视觉!(人工智能、深度学习、机器学习、神经网络、图像处理)
【SLAM】【VIO】双目视觉+超强三维感知力【功能演示——半稠密点云】“实测”
大疆livox-mid360定位
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
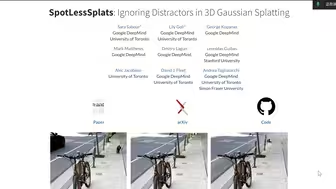
【三维重建】spotlessSplats:能忽略移动物体干扰的3DGS场景重建!
再来一发优化好的四妹!
网页运行的自动化生产线PLC实训系统(可下载PLC源码、PLC sim中文版)
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——鲁棒性强】“实测”
嵌入式linux项目,复刻IPhone相机测距功能 ,单目相机+IMU,Vins-mono slam,应用开发,驱动,RK3568,AR
CAD-Mesher: A Convenient, Accurate, Dense Mesh-based Mapping Module in SLAM for
30秒剪了我两周
电力巡检,激光slam在电力方面应用,激光雷达应用
激光SLAM得应用,土方计算,地形测量,房屋立面绘制,车库结构,隧道超欠挖,室内盘煤,林业树冠胸径冠幅等归一化分类,电力弧垂危险点检测绝缘子分析等
带 SLAM 和 Nevegation2 的 ROS2
AirSLAM: An Efficient and Illumination-Robust Point-Line Visual SLAM System
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT【功能演示——地表爬纹】“实测”
这几年,激光雷达发展迅速,成本也下降许多,性价比就上来了
CVPR'24 开源|特征匹配新范式:从语义区域到点的匹配框架
【中字】Blender 使用网格变形修改器绑定复杂网格表面
什么是三角测距?TOF测距?激光雷达怎么精准测距的?