V
主页
激光SLAM的入门讲解视频教程(四)|liosam工程实现和代码模块讲解(上)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
激光SLAM的入门讲解视频教程(五)|liosam工程实现和代码模块讲解(下)
激光SLAM的入门讲解视频教程(三)|liosam原理框架讲解
激光SLAM的入门讲解视频教程(一)|SLAM简介
激光SLAM的入门讲解视频教程(二)|SLAM实现方向及其拓展
ROS2功能系列视频教程 (四)| ROS2 slam-toolbox建图
ROS2功能系列视频教程 (五)| ROS2 cartographer建图
ROS入门系列教程|WHEELTEC
研究生必学!目前B站最好的【三维重建】教程,15小时深入浅出SfM与SLAM核心算法!计算机视觉3D三维重建/摄像机几何/多视图几何
ROS2功能系列视频教程 (二)| ROS2键盘控制
【激光SLAM专题】LOAM如何运行
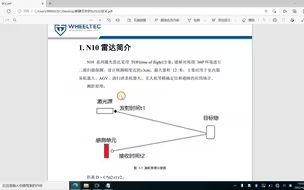
手把手教你如何通过STM32与N10激光雷达实现小车跟随
ROS入门系列教程(六)——rqt可视化工具集(WHEELTEC)
ROS2功能系列视频教程 (十)| ROS2 WEB浏览器监控
ROS2功能系列视频教程 (六)| ROS2 2D导航
ROS入门系列教程(八)——TF坐标变换(WHEELTEC)
ROS入门系列教程(一)——工作空间与功能包(WHEELTEC)
ROS2功能系列视频教程 (九)| ROS2视觉跟随
ROS入门系列教程(二)——launch文件与参数服务器(WHEELTEC)
ROS Moveit桌面机械臂进阶视频教程(七)|IKfast配置讲解第一部分
ROS2功能系列视频教程 (十二)| ROS2 KCF跟随
ROS2功能系列视频教程 (八)| ROS2视觉巡线
WHEELTEC推出新品镭神智能16线激光雷达C16
【较真系列】讲人话-3d gaussian splatting全解(原理+代码+公式)【3】 雪球颜色
手把手教你如何通过STM32和STP23L测距模块实现小车沿墙壁走直线
ROS2功能系列视频教程 (七)| ROS2雷达跟随
ROS2功能系列视频教程 (三)| ROS2gmapping建图
ROS Moveit桌面机械臂进阶视频教程(五)|Moveit_Config参数讲解第一部分
手把手教你如何通过STM32与N10激光雷达实现小车避障
ROS入门系列教程(四)——如何把ROS和STM32联系起来(WHEELTEC)
ROS Moveit桌面机械臂进阶视频教程(六)|Moveit_Config参数讲解第二部分
ROS入门系列教程(三)——ROS话题(WHEELTEC)
【较真系列】讲人话-3d gaussian splatting全解(原理+代码+公式)【4】 高性能渲染与机器学习
【较真系列】讲人话-3d gaussian splatting全解(原理+代码+公式)【2】 抛雪球
ROS入门系列教程(五)——ROS传感器介绍(WHEELTEC)
Gaussian Splatting三维重建之沈阳理工大学图书馆
ROS2功能系列视频教程 (十一)| ROS2 USB手柄控制
纯视觉系统和激光雷达哪个好?迪哥精讲基于纯视觉系统的无人驾驶算法,论文解读+项目实战
从零开始实现一个球平衡机器人(附源码讲解)
【已完结】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,原理解读+实战分析,迪哥一次性全讲明白!—人工智能/神经网络/深度学习
通过英文ROS wiki快速入门ROS教程(六)|使用ROS-tutorials学习话题