V
主页
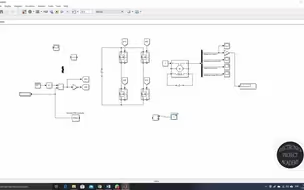
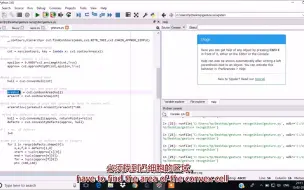
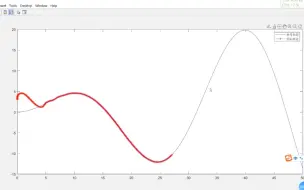
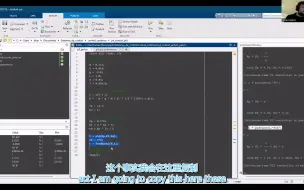
使用 Stanley 转向控制和 PID 速度控制的路径跟踪仿真
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
Carsim 中用于路径跟踪的非线性模型预测控制与 Stanley nmpc
纯跟踪转向控制和PID速度控制的路径跟踪仿真
AGV Simulation+Matlab:路径规划和路径跟踪
Carsim 中用于路径跟踪的非线性模型预测控制( NMPC )与 Stanley
小车直立环+速度环,不能保持在原地,有没有大佬可以指导一下
使用PID控制直流电机的位置和速度| ROS 控制
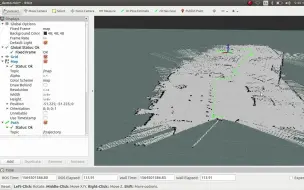
使用 RPLidar A1 在 ROS 中基于激光雷达的 SLAM 和路径跟踪
使用粒子滤波器进行自我位置估计的操作检查算法
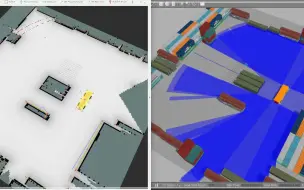
ROS 和 Gazebo 中 4 轮转向 AGV 的路径规划
卡尔曼滤波器 GPS(蓝线:实际轨迹。蓝点:GPS 信号,红线:估计轨迹)
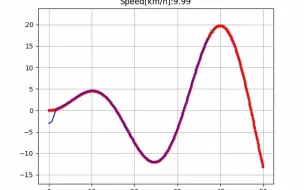
使用opencv python检测车速
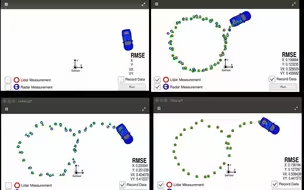
使用基于传感器融合的扩展卡尔曼滤波器进行对象跟踪
基于Matlab-Simmechanics的PID控制手臂机器人
自动驾驶stanley算法/matlab
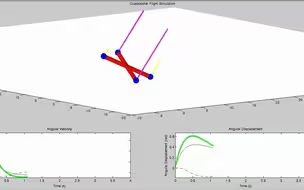
模拟具有初始随机 300 度/秒角速度扰动(在所有角度)和 PID 控制器的四轴飞行器 matlab四轴飞行器动力学/控制仿真
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
使用 Arduino 控制步进电机 - 教程
使用 RRT* 和 OCTOMAP 在动态环境中进行无人机路径规划
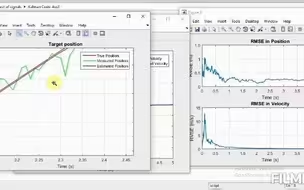
用于移动目标跟踪的卡尔曼滤波器(MATLAB)
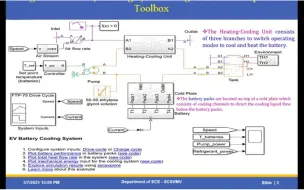
使用 Matlab Simulink 设计与实现电动汽车 (EV) 电池冷却系统
04_PID改进讲解-1
多智能体路径规划 使用增强的 AA-SIPP(m) 算法规划一组无碰撞轨迹
使用扩展卡尔曼滤波器的用于自身位置估计的操作确认算法
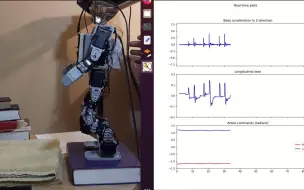
利用躯干倾斜作为反馈,对踝关节进行简单的PD控制,实现小推力恢复
线性最小二乘估计的MATLAB程序| [估计与跟踪]
使用 Simulink 进行四象限直流电机控制仿真建模模型
使用 Opencv Python 进行计算机视觉汽车速度检测
使用python和opencv进行手势识别
汽车检测和跟踪以及车道检测 openCV
matlab以 72 公里/小时的速度以 1 秒的时间间隔进行稳定的四辆卡车编队的模拟和动画
RRT路径规划
Informed RRT* path planning路径规划算法
使用圆拟合的物体形状识别
DARP 算法 - 优化多机器人覆盖路径规划的划分区域算法
01_案例展示
车道偏离警告系统 (LDWS) 的车道跟踪和安全距离系统 (SDS) 的车辆检测和跟踪
使用 A* 算法的基于二维网格的最短路径规划/python
pure pursuit 纯跟踪算法,自动驾驶/matlab
【2024电赛】省一三子棋片段,可惜测评完就热熔胶裂开了,只有师弟录制的非完全体片段 也算是来过的证明吧
Matlab PID调谐器