V
主页
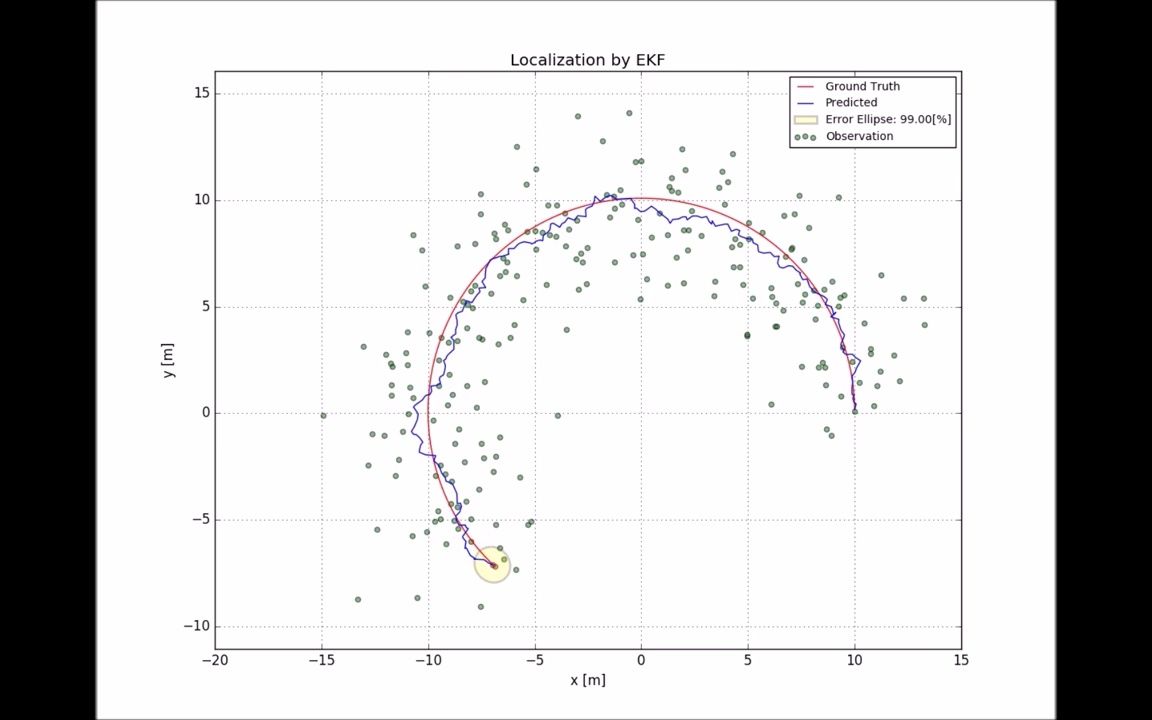
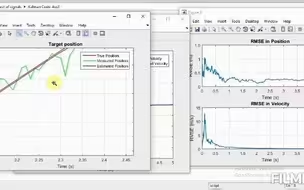
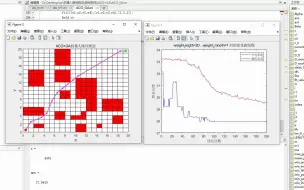
使用扩展卡尔曼滤波器的用于自身位置估计的操作确认算法
发布人
每个参数的说明。・ Ground Truth:真实值 ・ Predicted:过滤值(后估计值) ・ Error Ellipse:错误椭圆(99%) ・ Observation:观察值(假设 GPS 等)
打开封面
下载高清视频
观看高清视频
视频下载器
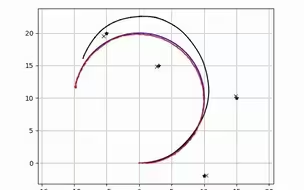
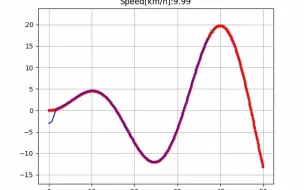
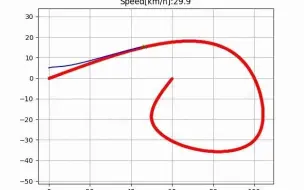
卡尔曼滤波器 GPS(蓝线:实际轨迹。蓝点:GPS 信号,红线:估计轨迹)
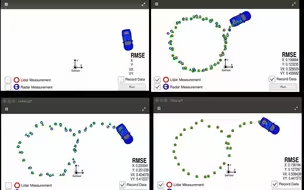
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
使用粒子滤波器进行自我位置估计的操作检查算法
使用基于传感器融合的扩展卡尔曼滤波器进行对象跟踪
基于扩展卡尔曼滤波器 (EKF) 和 UWB 传感器和摄像头的无人机定位
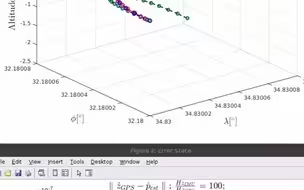
INS/GPS 导航系统上的扩展卡尔曼滤波器在 1:100 IMU/GPS 融合比下在线演示 EKF 完整估计性能
EKF SLAM 扩展卡尔曼滤波slam的matlab算法
使用 MATLAB 进行姿态估计(扩展卡尔曼滤波器,MPU9250)
使用粒子滤波器实时估计车辆的位置和方向
基于扩展卡尔曼滤波器ekf的 SLAM
用于移动目标跟踪的卡尔曼滤波器(MATLAB)
使用扩展卡尔曼滤波器在 MATLAB 中生成的 SLAM 模拟。该实现从激光扫描匹配和车轮里程计生成两个运动估计
纯跟踪转向控制和PID速度控制的路径跟踪仿真
使用 Stanley 转向控制和 PID 速度控制的路径跟踪仿真
使用 Arduino 控制步进电机 - 教程
无人机三维地图路径规划。传统A算法搜索
使用 A* 算法的基于二维网格的最短路径规划/python
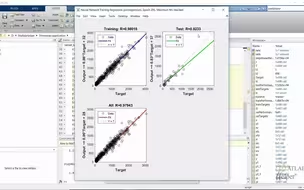
使用时间序列神经网络进行数据预测matlab算法程序
如何使用 Arduino 和 MPU6050 陀螺仪和加速度计传感器测量角度
用于汽车 GPS 和加速度计的卡尔曼滤波器传感器融合
这6个黑科技神器,我直接跪拜!
EKF SLAM 在低噪声测量下使用来自机器人的模拟数据 EKF 状态由机器人姿态和地标位置组成。机器人能够成功地关闭循环并纠正地标估计位置
用于姿态估计的传感器融合算法 6DOF
多体弹簧-质量-阻尼器系统的运动方程和 MATLAB/Python 仿真
基于神经网络的 EKF 定位
基于遗传算法+蚁群混合改进算法的 GA-ACO机器人路径规划
DARP 算法 - 优化多机器人覆盖路径规划的划分区域算法
教你用Python制作自动化游戏脚本,可举一反三,让你拥有属于自己的游戏脚本(附源码)
多智能体路径规划 使用增强的 AA-SIPP(m) 算法规划一组无碰撞轨迹
Python批量操作Excel+pandas实战!!
在 Python 中使用 Keras 和 TensorFlow 2 使用 LSTM 自动编码器进行时间序列异常检测
Informed RRT* path planning路径规划算法
数据分析思维10小时学会Excel函数、可视化、数据透视表+数据分析实战
艰难啃pytorch,是不是用惯了python的作者大佬没有考虑代码可读性
EKF定位RRT路径规划路径跟随机动悬停着陆UGV无人机
用于异常检测的 LSTM 自动编码器
基于二维网格的最短路径规划与 Dijkstra 算法
一个很变态…但能让你快速学会python的神奇方法!
Python 中快速探索随机树[RRT] 算法的实现 使用 PyGame 在 Python 中实现了 RRT
python中读取excel最快的6种方法