V
主页
京东 11.11 红包
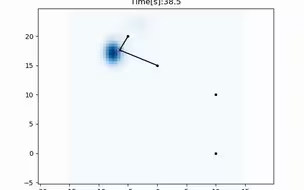
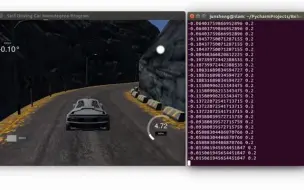
使用粒子滤波器进行自我位置估计的操作检查算法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
使用扩展卡尔曼滤波器的用于自身位置估计的操作确认算法
使用粒子滤波器实时估计车辆的位置和方向
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
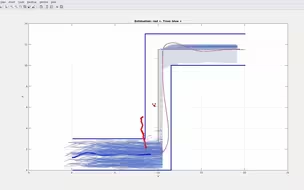
卡尔曼滤波器 GPS(蓝线:实际轨迹。蓝点:GPS 信号,红线:估计轨迹)
使用直方图滤波器进行 2D 定位模拟
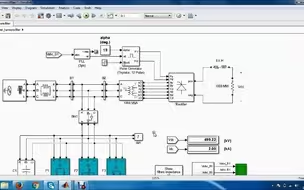
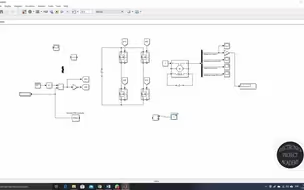
基于多目标粒子群算法的微电网优化matlab算法
使用贝叶斯滤波器 matlab 代码的测量估计
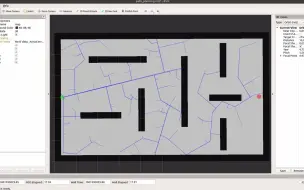
使用地图数据进行定位的粒子滤波器 matlab
一维高斯滤波器去除噪声matlab程序实现
使用 RRT 算法进行地图搜索
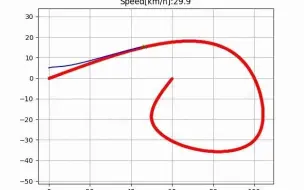
使用 Stanley 转向控制和 PID 速度控制的路径跟踪仿真
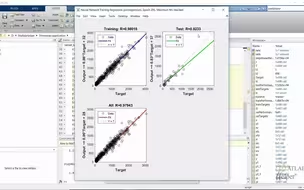
使用时间序列神经网络进行数据预测matlab算法程序
使用 MATLAB 进行姿态估计(扩展卡尔曼滤波器,MPU9250)
在 Python 中使用 Keras 和 TensorFlow 2 使用 LSTM 自动编码器进行时间序列异常检测
使用 A* 算法的基于二维网格的最短路径规划/python
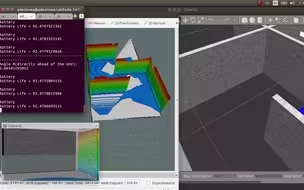
EKF SLAM 在低噪声测量下使用来自机器人的模拟数据 EKF 状态由机器人姿态和地标位置组成。机器人能够成功地关闭循环并纠正地标估计位置
使用python和opencv进行手势识别
纯跟踪转向控制和PID速度控制的路径跟踪仿真
使用 moveit、Ros_control 和 Python 进行 4 自由度机器人手臂运动 go_to_pose
6自由度和9自由度传感器与Madgwick滤波器、MPU6050、HMC5883L(GY-86模块)融合
如何在 Matlab 中使用 Sobel 和 Canny 边缘滤波器检测边缘。以及两者之间的比较
多智能体路径规划 使用增强的 AA-SIPP(m) 算法规划一组无碰撞轨迹
带互补滤波器的 IMU 数据处理和 Matlab 中的 GUI 介绍
使用 Arduino 控制步进电机 - 教程
并联式混合动力汽车能量管理动态规划的实现matlab算法
Simulink 中的三相谐波滤波器建模 matlab
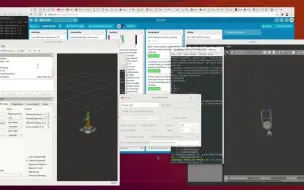
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
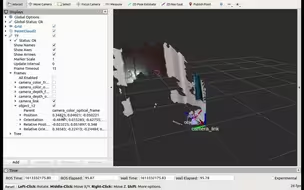
使用Realsense深度相机从点云进行目标检测和3D姿态估计
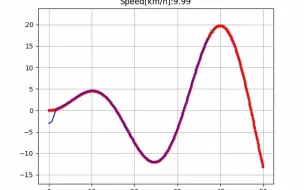
使用 Opencv Python 进行计算机视觉汽车速度检测
使用 Simulink 进行四象限直流电机控制仿真建模模型
【2024年数据分析】10小时学会数据分析、挖掘、清洗、可视化从入门到项目实战(完整版)学会可做项目
多体弹簧-质量-阻尼器系统的运动方程和 MATLAB/Python 仿真
使用卷积神经网络的自动驾驶
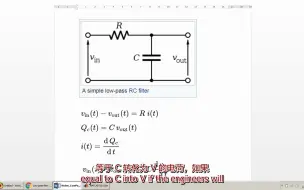
如何在 MATLAB 中使用 Simulink 设计简单的低通 RC 滤波器
让我们用 Python 构建一个音频频谱分析仪!(pt. 1) 波形查看器
ros如何在避开障碍物的同时进行导航
10小时学会Excel函数、可视化、数据透视表+数据挖掘 | 数据可视化!
使用 RRT* 和 OCTOMAP 在动态环境中进行无人机路径规划
比李峋还好看的爱心代码!
动态窗口DWA 算法,动态避障matlab