V
主页
使用基于传感器融合的扩展卡尔曼滤波器进行对象跟踪
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
移动自主机器人中的传感器融合| IMU+车轮里程计
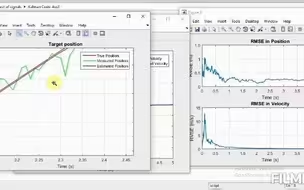
卡尔曼滤波器 GPS(蓝线:实际轨迹。蓝点:GPS 信号,红线:估计轨迹)
使用扩展卡尔曼滤波器的用于自身位置估计的操作确认算法
INS/GPS 导航系统上的扩展卡尔曼滤波器在 1:100 IMU/GPS 融合比下在线演示 EKF 完整估计性能
EKF SLAM 扩展卡尔曼滤波slam的matlab算法
卡尔曼滤波完全指南,从理论到实践,快速掌握目标追踪~
用于移动目标跟踪的卡尔曼滤波器(MATLAB)
基于扩展卡尔曼滤波器 (EKF) 和 UWB 传感器和摄像头的无人机定位
用于汽车 GPS 和加速度计的卡尔曼滤波器传感器融合
欧乌吸收了玛吉玛!
狮子+蜘蛛=? 歌查德炼金术卡的融合实验 「你猜会成哪只怪人?」
使用 MATLAB 进行姿态估计(扩展卡尔曼滤波器,MPU9250)
来自 IMU 传感器的 Roll Pitch Yaw 并在 RVIZ ROS 中对其进行可视化 | MPU6050
6自由度和9自由度传感器与Madgwick滤波器、MPU6050、HMC5883L(GY-86模块)融合
如何使用 Arduino 和 MPU6050 陀螺仪和加速度计传感器测量角度
【突袭暗影传说 Raid:Shadow Legends】新融合遛狗人
用于姿态估计的传感器融合算法 6DOF
快速掌握卡尔曼滤波,从理论到实践,一次性学会目标追踪~
豆腐不一样的做法,鸡蛋煎豆腐,两种香味融合,真不错!试试吧
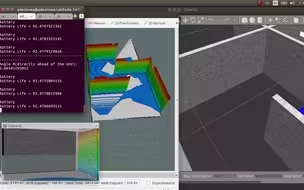
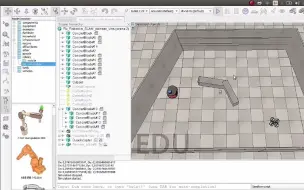
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
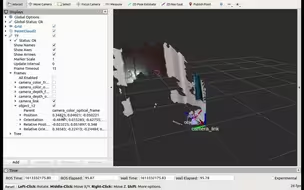
使用Realsense深度相机从点云进行目标检测和3D姿态估计
【从放弃到精通】B站讲的最好的卡尔曼滤波器-目标追踪课程,目标追踪—计算机博士精讲卡尔曼滤波算法教程,从理论到实战,不再走弯路!(matlab_卡尔曼滤波原理)
A星融合DWA的路径规划算法实现静态避障碍及动态避障matlab A*
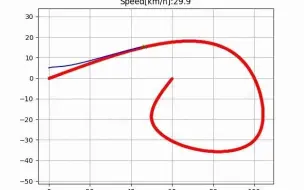
使用 Stanley 转向控制和 PID 速度控制的路径跟踪仿真
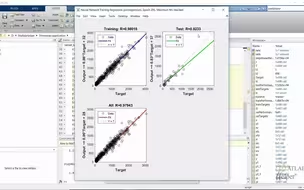
使用时间序列神经网络进行数据预测matlab算法程序
使用 SIMULINK MATLAB 进行直流电机仿真
这融合很合理 对吧?
使用 ROS 2、Gazebo 和 OpenCV 进行车道跟踪模拟
Carsim 中用于路径跟踪的非线性模型预测控制与 Stanley nmpc
《好玩,都给我去玩》冰封未来 银河战士零点HACK
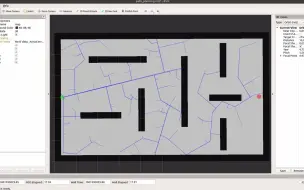
使用 RRT 算法进行地图搜索
EKF定位RRT路径规划路径跟随机动悬停着陆UGV无人机
智能手机IMU深度学习室内定位轨迹预测
使用 Arduino 控制步进电机 - 教程
使用 Simulink 进行四象限直流电机控制仿真建模模型
使用粒子滤波器进行自我位置估计的操作检查算法
法老王最忠实的仆人,初代御三家,永远的师匠
你游特有的加载时长。现在登船三十多天了,感觉电池不够用,特别是这些精灵融合的材料好难弄啊,有大佬解释下如何快速融合精灵吗
MATLAB 串口示波器和 IMU 姿态显示 STM32 Serial Oscilloscope and Cube