V
主页
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
发布人
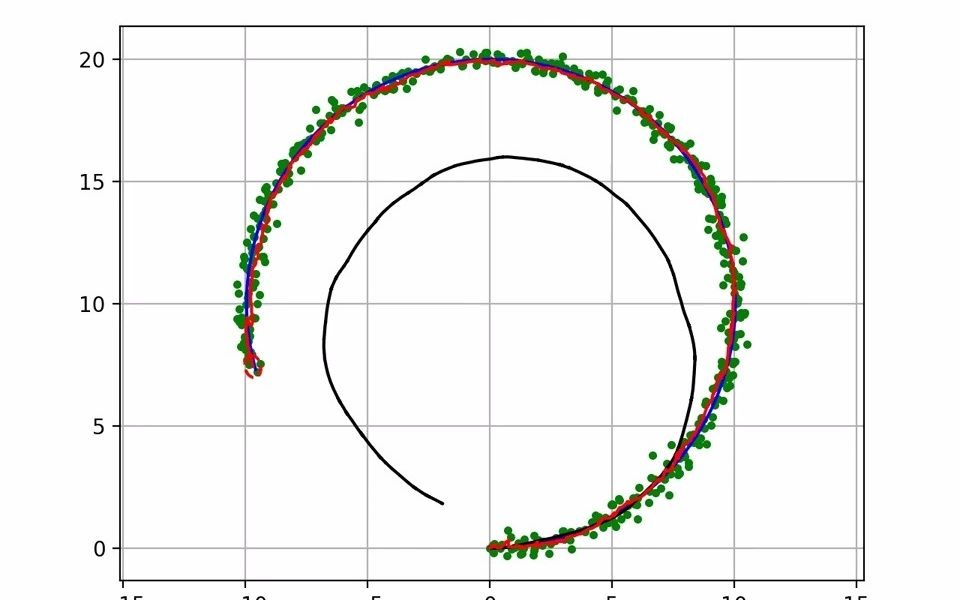
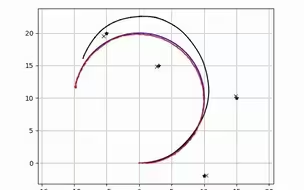
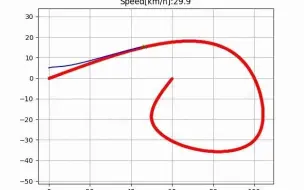
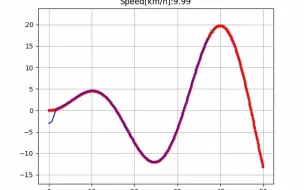
这是带有扩展卡尔曼滤波器 (EKF) 的传感器融合定位。蓝线为真实轨迹,黑线为航位推算轨迹,绿点为定位观测(如GPS),红线为EKF估计轨迹。红色椭圆是用 EKF 估计的协方差椭圆
打开封面
下载高清视频
观看高清视频
视频下载器
使用扩展卡尔曼滤波器的用于自身位置估计的操作确认算法
卡尔曼滤波器 GPS(蓝线:实际轨迹。蓝点:GPS 信号,红线:估计轨迹)
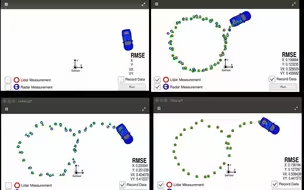
使用基于传感器融合的扩展卡尔曼滤波器进行对象跟踪
基于扩展卡尔曼滤波器 (EKF) 和 UWB 传感器和摄像头的无人机定位
使用 MATLAB 进行姿态估计(扩展卡尔曼滤波器,MPU9250)
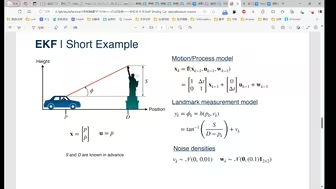
【多伦多大学—自动驾驶课程】状态估计与定位(卡尔曼滤波3):雅可比矩阵,扩展卡尔曼滤波EKF, 示例
移动自主机器人中的传感器融合| IMU+车轮里程计
EKF SLAM 扩展卡尔曼滤波slam的matlab算法
EKF定位RRT路径规划路径跟随机动悬停着陆UGV无人机
用于汽车 GPS 和加速度计的卡尔曼滤波器传感器融合
如何使用 Arduino 和 MPU6050 陀螺仪和加速度计传感器测量角度
INS/GPS 导航系统上的扩展卡尔曼滤波器在 1:100 IMU/GPS 融合比下在线演示 EKF 完整估计性能
使用粒子滤波器进行自我位置估计的操作检查算法
基于扩展卡尔曼滤波器ekf的 SLAM
用于姿态估计的传感器融合算法 6DOF
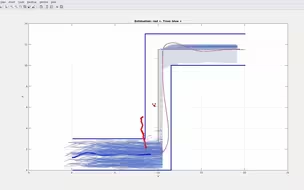
使用扩展卡尔曼滤波器在 MATLAB 中生成的 SLAM 模拟。该实现从激光扫描匹配和车轮里程计生成两个运动估计
基于神经网络的 EKF 定位
具有卡尔曼定位不确定性的 RRT 路径规划/matlab
来自 IMU 传感器的 Roll Pitch Yaw 并在 RVIZ ROS 中对其进行可视化 | MPU6050
使用直方图滤波器进行 2D 定位模拟
使用 Arduino 控制步进电机 - 教程
用于移动目标跟踪的卡尔曼滤波器(MATLAB)
使用 Stanley 转向控制和 PID 速度控制的路径跟踪仿真
可修改定位神器,老司机模拟器
使用地图数据进行定位的粒子滤波器 matlab
纯跟踪转向控制和PID速度控制的路径跟踪仿真
抵押车定位怎样才能拆干净
多体弹簧-质量-阻尼器系统的运动方程和 MATLAB/Python 仿真
这6个黑科技神器,我直接跪拜!
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
使用 SIMULINK MATLAB 进行直流电机仿真
使用 Simulink 进行四象限直流电机控制仿真建模模型
使用卷积神经网络的自动驾驶
A星融合DWA的路径规划算法实现静态避障碍及动态避障matlab A*
无人机三维地图路径规划。传统A算法搜索
使用python和opencv进行手势识别
使用 RRT* 和 OCTOMAP 在动态环境中进行无人机路径规划
使用 MATLAB Simulink 对车辆 HVAC 系统进行建模和分析汽车车载空调建模
使用 Matlab 绘制频谱
在Matlab Simulink 中绘制直流电机特性| Matlab Simulink 直流电机仿真