V
主页
京东 11.11 红包
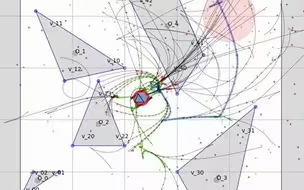
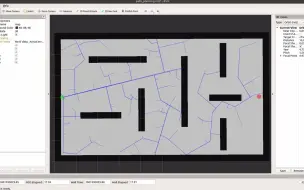
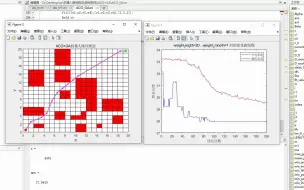
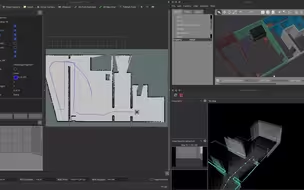
使用 RRT* 和 OCTOMAP 在动态环境中进行无人机路径规划
发布人
网络
打开封面
下载高清视频
观看高清视频
视频下载器
使用 RRT 和非线性 MPC 的动态环境中的四旋翼运动规划和控制/matlab
从 START 到 GOAL 的 RRT* 路径解决方案 | 路径规划
EKF定位RRT路径规划路径跟随机动悬停着陆UGV无人机
快速探索随机树(RRT)在半结构化环境中自动驾驶汽车轨道探索和路径规划的应用
RRT路径规划
RRT 路径规划算法滑模非线性控制器用于将机器人稳定在所需的配置
A星融合DWA的路径规划算法实现静态避障碍及动态避障matlab A*
RRT*路径规划
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
无人机三维地图路径规划。传统A算法搜索
Informed RRT* path planning路径规划算法
使用 RRT 算法进行地图搜索
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
具有卡尔曼定位不确定性的 RRT 路径规划/matlab
基于遗传算法+蚁群混合改进算法的 GA-ACO机器人路径规划
使用 MATLAB Simulink 模拟无人机
在 ROS 和 Gazebo 中使用激光雷达和 RGBD 相机的 RTAB-Map SLAM
多智能体路径规划 使用增强的 AA-SIPP(m) 算法规划一组无碰撞轨迹
并联式混合动力汽车能量管理动态规划的实现matlab算法
使用 Stanley 转向控制和 PID 速度控制的路径跟踪仿真
AGV Simulation+Matlab:路径规划和路径跟踪
DARP 算法 - 优化多机器人覆盖路径规划的划分区域算法
基于粒子群的路径规划/matlab
在 3D 环境中模拟四轴飞行器动力学、控制和路径规划
基于非线性模型预测控制的目标跟踪约束 NMPC matlab无人机算法
具有动态避障的实时路径规划使用 OpenFrameworks 库在 C++ 中完成实现
基于天牛须算法,蚁群算法以及改进天牛须算法的3D路径规划 /matlab
ROS 和 Gazebo 中 4 轮转向 AGV 的路径规划
基于采样的算法 RRT、RRT*和 Informed RRT 的 MATLAB(Informed RRT)
使用 Simulink 加速无人机自动驾驶仪的设计、开发和飞行测试
基于采样的算法 RRT、RRT*和 Informed RRT 的 MATLAB (RRT*)
使用 MATLAB 进行姿态估计(扩展卡尔曼滤波器,MPU9250)
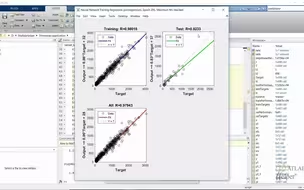
使用时间序列神经网络进行数据预测matlab算法程序
纯跟踪转向控制和PID速度控制的路径跟踪仿真
使用 Arduino 控制步进电机 - 教程
基于扩展卡尔曼滤波器 (EKF) 和 UWB 传感器和摄像头的无人机定位
使用 Simulink 进行四象限直流电机控制仿真建模模型
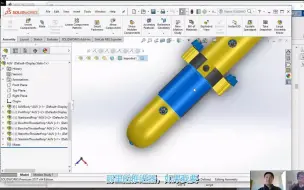
导入AUV的CAD模型进行动态仿真| AUV深潜,第2部分
使用 SIMULINK MATLAB 进行直流电机仿真
RRT* + LQR 仿真策略 - 差动驱动模型 python