V
主页
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
发布人
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!#人工智能 #编程 #科技 #计算机视觉 #SLAM 在「3D视觉工坊」微信公众号回复:「原论文」,获取论文代码和链接,快学起来! 本文介绍了一种名为SplaTAM的方法,它使用3D高斯散列表示法实现密集的SLAM系统。该方法通过在线优化明确体积表示,使用可微分的渲染实现快速优化和优化,并具有确定哪些区域以前被映射以及具有结构化的地图扩展功能。实验结果表明,SplaTAM在相机姿态估计、地图构建和新视角合成方面取得了最先进的性能,超过了以往的方法。此外,SplaTAM还允许实时渲染高分辨率密集的3D地图。@3D视觉工坊
打开封面
下载高清视频
观看高清视频
视频下载器
〖最新〗官方ChatGPT4.0怎么免费国内无限制使用!chatgpt5.0都快发布了,写论文,安装订阅付费手机安卓电脑下载GPT4o免费教程,100%成功!
大概是个预告
【ChatGPT4.0手机版】国内无需魔法,无限次数使用教程来了!
苹果M4 Mac Mini:3D渲染性能全面评测
无人机SLAM入门教程(一):课程概述1.4 卡尔曼滤波
fastlio建图与自主导航演示
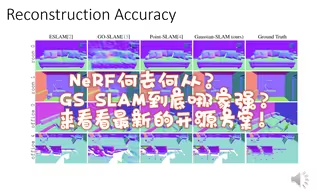
NeRF何去何从?GS SLAM到底哪家强?来看看最新的开源方案!
MIT《神经计算导论|MIT 9.40 Introduction to Neural Computation, Spring 2018》
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
【CGSAI】SLAM Zero to One
矿洞扫描有难度?看赛尔S10如何轻松应对!
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
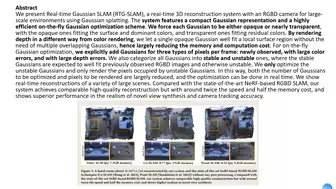
11月15日组会:RTG-SLAM: Real-time 3D Reconstruction at Scale Using Gaussian Splatting
四旋翼无人机-PX4控制算法代码
用AI做古人怼人视频,小白也能涨粉20W
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
大作业|激光-视觉-IMU-GPS融合SLAM算法
Google Gemini 全新升级!文生图+实时语音对话,无限免费,附最新安装教程 | 零度解说
MIT《组合数学中的概率方法|Probabilistic Methods in Combinatorics》中英字幕(deepseek翻译)
弱光环境下的SLAM系统
前方高能,这27个变态AI,一定要偷偷用起来!
基于Gazebo的无人车激光SLAM建图与导航仿真
虚幻引擎 5.5 ! 如何建模!
多旋翼无人机使用多相机SLAM同时定位
自动驾驶入门技术全栈实战解析-1-感知篇
用于场景渲染的几何感知高斯抛雪球算法
神经辐射场照亮动态SLAM:构建精细场景地图
大学建模作品,导师看了直接给我推荐去网易了!
SGS-SLAM:神经密集SLAM的语义高斯飞溅
试一下渲染
首发!首个集成内容投影的实时结构光系统!
【新游戏电台】QA特别篇:专访温铁军,温老师如何看美国总统大选,数字货币,人工智能等时事热点问题
BEV&Occ提升颗粒度的方案
MIT《动物行为学|MIT 9.20 Animal Behavior Fall 2013》中英字幕(deepseek)
在 1ms 内近似光线追踪!- ROMA:利用位运算进行快速场景可见性检测
【TA进阶】头发渲染:原理与实现
【麻省理工】机器学习中的公平性探讨(中英外挂)
ICML'24开源 迈向真实世界!LEO:3D世界中的具身通才Agent
MIT突破芯片极限!量子隧穿晶体管问世,AI算力或将革命性提升