V
主页
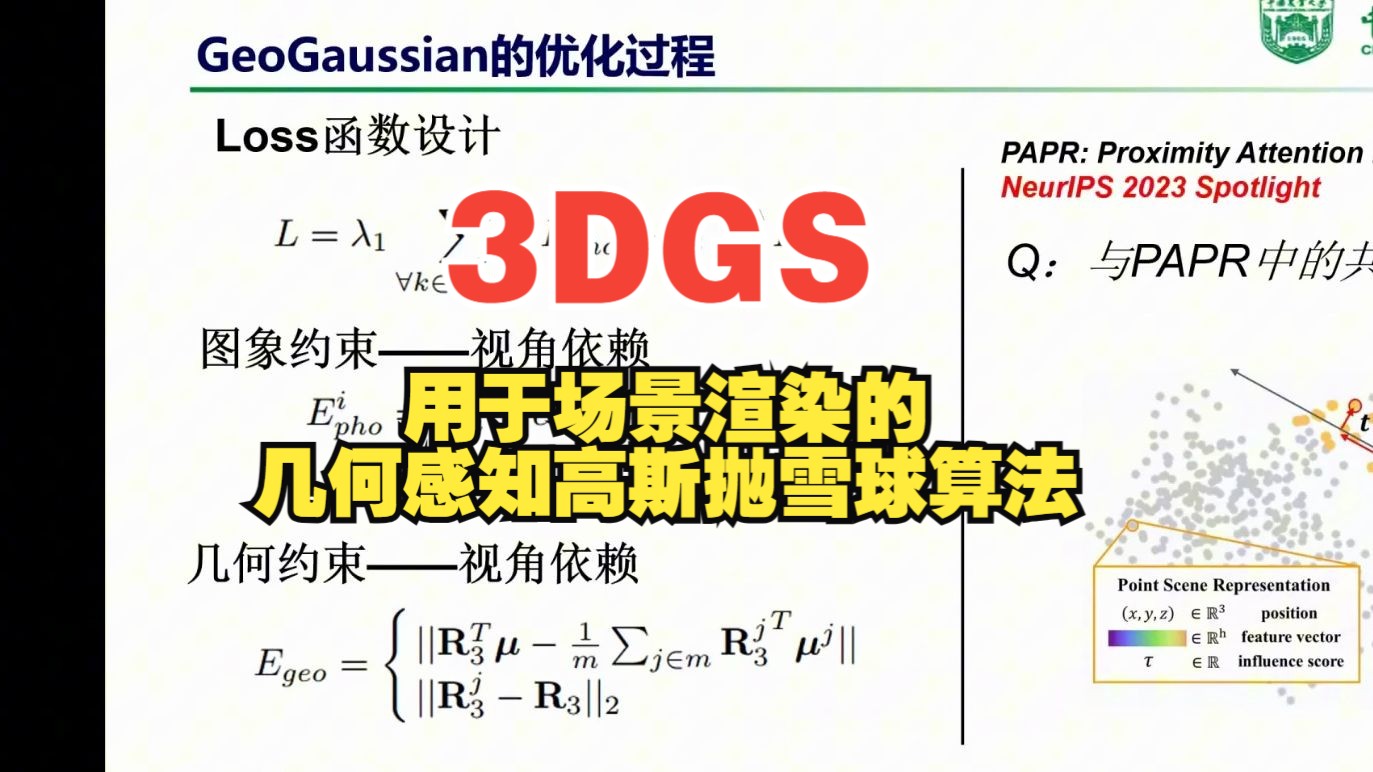
用于场景渲染的几何感知高斯抛雪球算法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
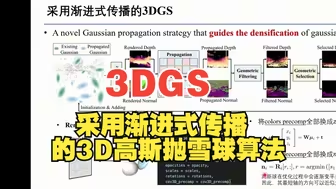
采用渐进式传播的3D 高斯抛雪球算法
高斯抛雪球SLAM
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
神经辐射场(NeRF)在学术界被替代?为何说3D高斯才是未来大势?附9篇必读论文和源码
3DGS 高斯泼溅 6千万高斯超大场景重建
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
如何进行三维重建?从单帧深度估计到完整模型重建
四旋翼无人机-PX4控制算法原理
[群友工作] DimensionX:港科大、清华、生数推出单图加可控视频扩散模型合成逼真的3D和4D场景方法,在真实世界和合成数据数据集上都取得了大幅度提升
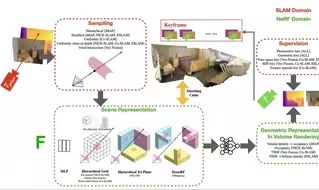
CVPR2024开源NeRF-SLAM新SOTA:请任意选择你的高效神经表征和渲染方程?
自动驾驶中的视觉感知技术
四旋翼无人机-PX4控制算法代码
SGS-SLAM:神经密集SLAM的语义高斯飞溅
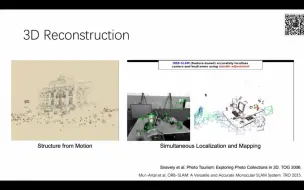
基于图像的三维重建
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
[非完整版]基于结构光投影三维重建技术系列课程-绪论
医学图像三维重建Demo OpenCV Qt VTK CT图像三维重建
UCL开源 | Spann3R:基于空间记忆,不估计相机参数也能实时重建(上篇)
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
【B站强推!】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,看完小白也能信手拈来,建议收藏!计算机视觉|点云
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
从零搭建一套结构光3D重建系统 [理论+源码+实践]
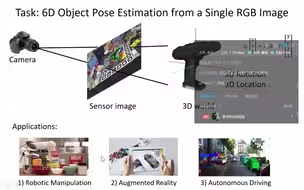
基于几何信息指导的单目6D物体姿态直接回归算法
DoGaussian:分布式训练3DGS,速度提升6倍以上,高质量渲染-上篇
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(上篇)
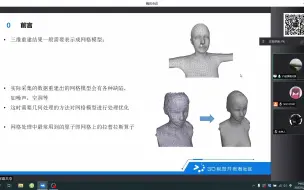
三维重建中的网格处理算法分享(公开课)
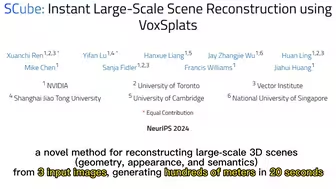
英伟达最新!SCube:仅用三张图,就能实现即时大规模三维场景重建
单目深度估计|连续帧方法实战课
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
面向3D视觉的科研方法 | 论文投稿与流程
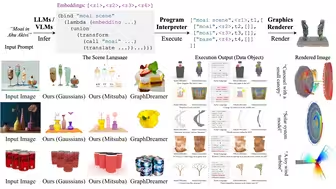
开源 | 场景语言的力量:用程序、单词和嵌入表示 场景,精准描绘3D/4D世界
图宾根大学最新提出 | 基于3D高斯的高效紧凑的三维场景表面重建技术
面向大尺度室内场景的主动式重建方法(公开课)
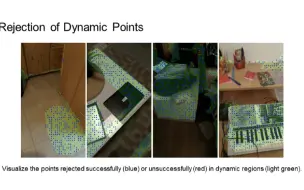
室内动态变化场景中的相机重定位(CVPR2021)
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
当3DGS遇上可泛化物体位姿估计
四旋翼模型简介-御风250模型
[群友工作] SCube,nVidia,多大,上交大等NeurIPS新工作,从稀疏图像生成大规模3D场景的方法,可使用3张图像20秒几生成数百米空间场景