V
主页
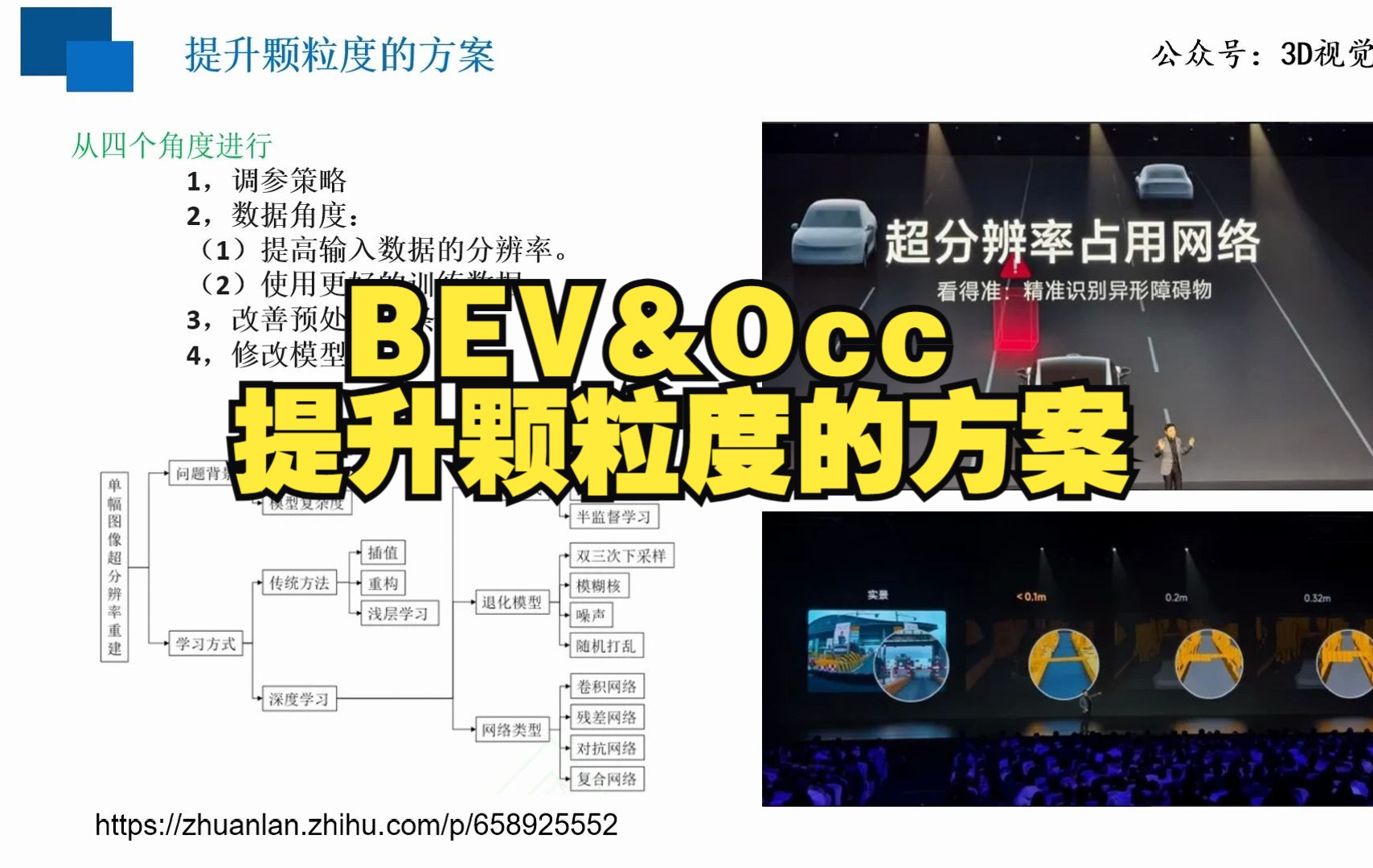
BEV&Occ提升颗粒度的方案
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
BEV与Occupancy网络的全景解析与实战
Occupancy的工程细节
南洋理工大学开源F-LOAM:最为精确和快速的开源激光SLAM方案之一
自动驾驶中的视觉感知技术
自动驾驶中常用传感器硬件介绍
Power:自动驾驶中鸟瞰视图下端到端实例预测
极快跟踪一切!DOT:无惧遮挡!
ICRA2021,时间异步的多相机视觉SLAM系统,效果大幅提升,更符合实际情况(代码即将开源)
香港科技大学!CVPR&NeurIPS2024开源 | 迈向通用可泛化的自动驾驶世界模型(上篇)
自动驾驶中实战课之Lidar与IMU的同步实战
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
英伟达-OmniDrive:基于稀疏查询的三维自驾VLM框架
英伟达最新开源|EmerNeRF全面基于NeRF的自动驾驶仿真框架无需分割!
五分钟开发一款自己的点云处理软件(python)
浙大&商汤最新研究:构建时空记忆力,用于提升3D对象检测和跟踪
NVIDIA再斩CVPR冠军方案!Hydra-MDP:突破端到端多模态自动驾驶!
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
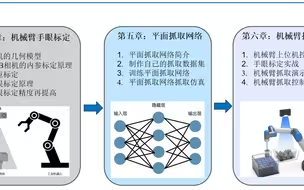
机械臂抓取-开发环境搭建
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(上篇)
如何进行三维重建?从单帧深度估计到完整模型重建
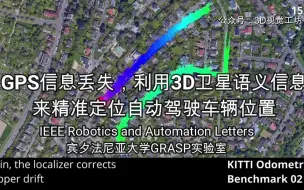
GPS信息丢失,利用3D语义信息来精准定位自动驾驶车辆位置,精度达到10m!
自动驾驶中的深度学习模型部署实战-数据预处理NPP库介绍及CUDA编程模型之线程操作
从零搭建一套结构光3D重建系统 [理论+源码+实践]
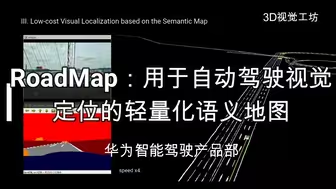
华为最新工作:RoadMap:用于自动驾驶视觉定位的轻量化语义地图
DoGaussian:分布式训练3DGS,速度提升6倍以上,高质量渲染-上篇
04 自动驾驶中多传感器信息融合理论(上篇)(Camera + LiDAR + Radar + IMU)(三)
高斯抛雪球SLAM
Go!最新NeRF和SLAM结合开源方案!超越NICE-SLAM和DROID-SLAM!
大模型时代下的端到端自动驾驶(上篇)
无人机|PID算法详解与实战(上)
ICRA2021,OmniDet:用于自动驾驶的基于环视摄像头的多任务视觉感知网络
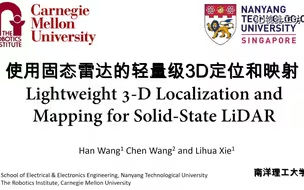
南洋理工大学: 使用固态雷达的轻量级3D定位和映射(代码开源)
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
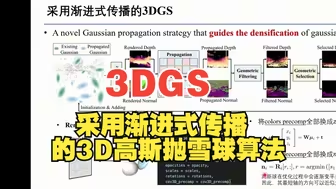
采用渐进式传播的3D 高斯抛雪球算法
浙大&阿里:用于自动驾驶的大规模神经场景渲染 [AAAI2023]
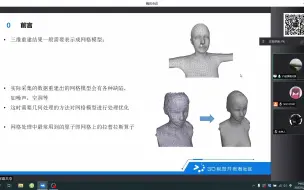
三维重建中的网格处理算法分享(公开课)
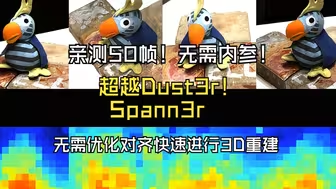
亲测50帧!无需内参!超越Dust3r!Spann3r:无需优化对齐快速进行3D重建!
CVPR2023:不使用任何3D数据标签,零样本学习3D场景理解
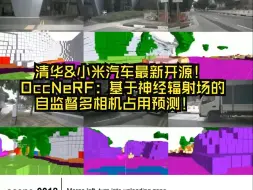
清华&小米汽车最新开源!OccNeRF:基于神经辐射场的自监督多相机占用预测!
点云3D深度学习模型与实践