V
主页
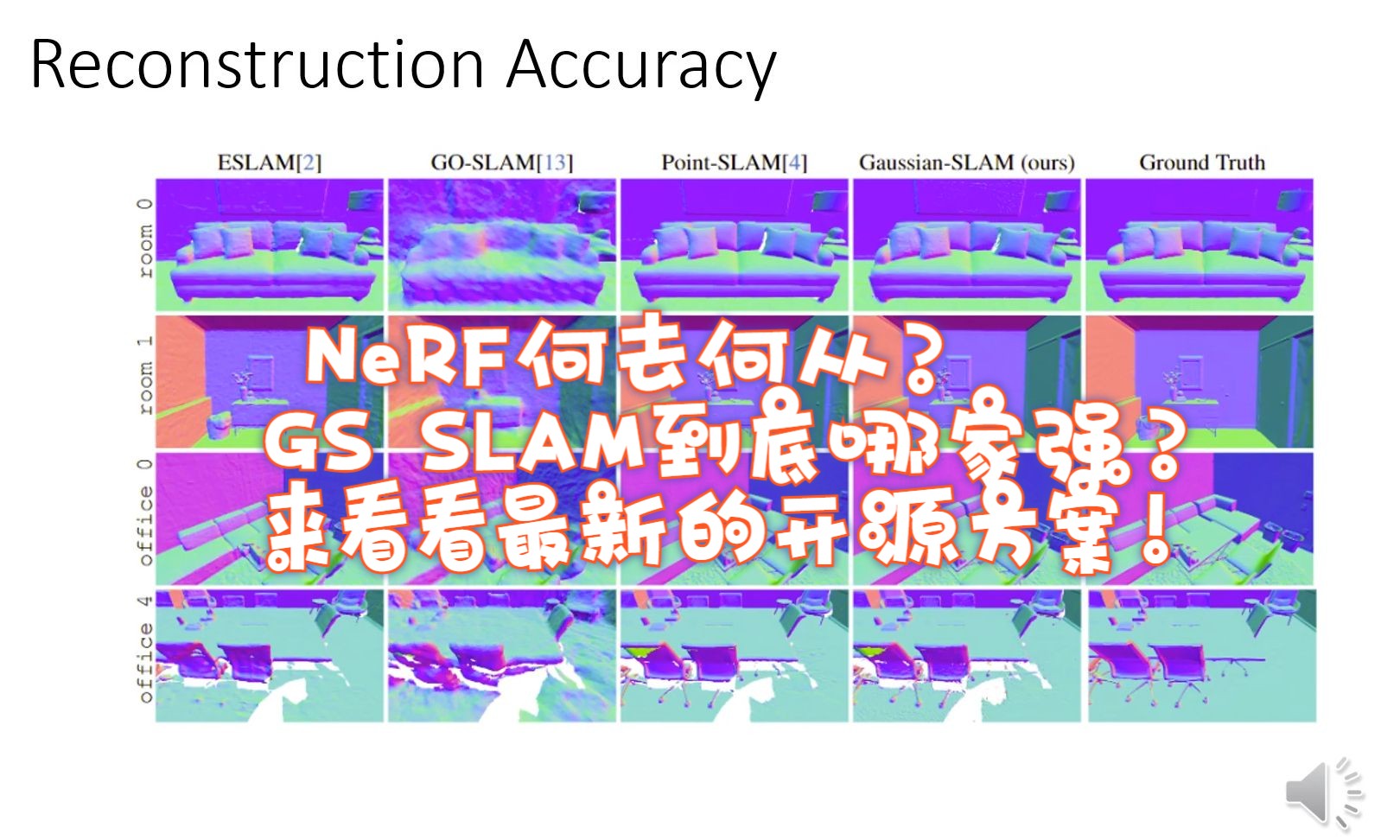
NeRF何去何从?GS SLAM到底哪家强?来看看最新的开源方案!
发布人
NeRF何去何从?GS SLAM到底哪家强?来看看最新的开源方案! #人工智能 #SLAM #计算机视觉 #算法 #科技 #3D GS 在微信公众号「3DCV」回复:「原论文」,获取论文代码和链接,赶快学起来! 最近3D GS已经彻底杀入了SLAM领域,光这一个月看见了好几篇GS SLAM的工作。例如上海AI Lab的GS-SLAM、帝国理工戴森机器人实验室的Gaussian Splatting SLAM、CMU的SplaTAM。今天笔者将为大家再分享一篇GS SLAM的最新开源工作Gaussian-SLAM,同样实现了照片级渲染的实时SLAM。Gaussian-SLAM提出了用于seeding和优化Gaussian splats的新策略,以将其从多视图离线场景扩展到RGBD序列。还扩展了Gaussian splats来编码几何图形并尝试跟踪场景表示。想看更多关于3D视觉、SLAM,自动驾驶等科技前沿,请立即关注@3D视觉工坊
打开封面
下载高清视频
观看高清视频
视频下载器
太稳啦!Gaussian Splatting杀入6D物体位姿估计!
极快跟踪一切!DOT:无惧遮挡!
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
上交最新开源!仅需4张图像实现高质量3D重建!
ICRA23开源 !动态环境下高鲁棒的雷达MOT SLAM!
无所不能!OASim基于3D GS的自动驾驶开源和自适应模拟器!
CVPR2024开源NeRF-SLAM新SOTA:请任意选择你的高效神经表征和渲染方程?
最新!无人机动态环境感知&规划新思路!
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
Depth Anything!最强开源单目深度估计SOTA!
CVPR'24 开源|特征匹配新范式:从语义区域到点的匹配框架
NeRF巅峰之作!超快端到端MeshLRM 实现不到1s的高质量重建!
大作业|激光-视觉-IMU-GPS融合SLAM算法
BMVC'24开源 | BaseBoostDepth:更强大的自监督单目深度估计
当3DGS遇上可泛化物体位姿估计
CVPR2024开源NetTrack:跟踪高动态物体!
端到端!首个开源视觉Transformer四旋翼控制避障方案!
这绝对是质量最高的单目深度估计开源方案!
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
CVPR'24商汤开源!3DGS再进化,可控的3D编辑!
华科大最新PointDreamer3D纹理重建,清晰如真
卡内基梅隆大学 | DarkGS移动光源3DGS!从泰坦尼克号这一幕说起
ECCV'24 | 更快更准!Meta最新FPV-NeRF:将NeRF完美应用FPV!
Kivicube AR平台:低代码可视化编辑即可完成SLAM场景制作
无需 GPS:语义地图引领多机器人室内外探索
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
大盘点!22项开源NeRF SLAM顶会方案整理(上)!
中山大学最新提出 基于LiDAR-测距-惯性融合的机器人群体协同SLAM系统
CVPR'24 3D-GS再进化Scaffold-GS实时自适应视图渲染的未来
港科大&南科大 跨平台和环境的统一多传感器SLAM数据集
ICRA2024 牛津提出NeRF融合激光雷达SLAM的大场景重建
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
CVPR2023开源 无纹理和重复纹理也能实现鲁棒的特征匹配!
[IROS2021] TUPPer-Map:用于 3D 语义建图的时间和统一全景感知
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
香港科技大学!CVPR&NeurIPS2024开源 | 迈向通用可泛化的自动驾驶世界模型(上篇)
Mobile-Seed:联合语义分割和边缘检测!
大盘点!22项开源NeRF SLAM顶会方案整理(下)!
NVIDIA再斩CVPR冠军方案!Hydra-MDP:突破端到端多模态自动驾驶!