V
主页
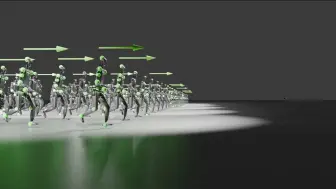
基于深度强化学习小车运动规划实现静态障碍物的绕行:单个障碍物模型推广到多个障碍物
发布人
时隔一个多月....从小车控制器-->单个障碍物的绕行-->多个障碍物的绕行;中间修改过网络结构,修改过激活函数,也修改过学习率的最后还是暂时都放弃了,毕竟跑大半天就看一眼结果效率确实不高。。先可着奖励函数修改,经常的会陷入局部极小值,每次出现局部极小值就把这个情况解决掉...感觉深度强化学习模型还是很神奇的...越来越坚信只要训练的情况足够多并且科学就可以得到想要的模型...
打开封面
下载高清视频
观看高清视频
视频下载器
动画讲解深度强化学习(RL、Q-网络、策略优化、大模型算法入门教程)
强化学习实现小车控制器
强推!2024年最适合初学者入门学习的《机器学习+深度学习+强化学习》上海交大和腾讯强强联合打造!太全面了!
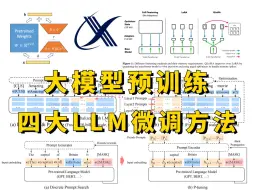
【共享LLM前沿】直观理解大模型预训练和微调!P-Tuning微调、Lora-QLora、RLHF基于人类反馈的强化学习微调,代码讲解
Diffusion Policy 结合 PPO 模仿+强化 (下)
【2024最新完整版】不愧是李宏毅教授!一口气学完机器学习、深度学习、强化学习、生成式AI等课程!一套全解决!
这应该是你能找到的讲解最系统全面的【强化学习】教程!北大出身王树森教授从零到一保姆式教学,小白也能很好懂!
通俗理解大模型从预训练到微调实战!P-Tuning微调、Lora-QLora、RLHF基于人类反馈的强化学习
dreamWaq复现尝试
太完整了!我居然3天时间就掌握了【机器学习+深度学习+强化学习+PyTorch】理论到实战,多亏了这个课程,绝对通俗易懂纯干货分享!
强化学习,启动!
简单粗暴!1小时理解大模型预训练和微调!了解四大LLM微调方法,大模型所需NLP基础知识,基于人类反馈的强化学习、P-Tuning微调、Lora-QLora
CV强化论文分享20241018-2
ChatGPT驱动清洁机器人背后依靠强化学习开源项目
如何用rl_sar采集训练执行器网络的数据
RLChina 2024 | 3小时强化学习入门课程-上
AI新作|英伟达:人形机器人!全身控制模式无缝转换
TITA强化学习迁移
在isaaclab中开发viplanner端到端导航
强强联合!GNN+强化学习!刷爆SOTA,霸榜顶会的28个方案
使用ROS2-Control + RL来控制四足机器人
6个智能体的编队导航与避障_补充实验
[TAI前沿]浅谈人工智能核心:深度学习与强化学习的奥秘
不愧是顶会收割机!迪哥精讲强化学习4大主流算法:PPO、Q-learning、DQN、A3C 50集入门到精通!
210:cyber 无人船优化反步控制 轨迹跟踪 强化学习Actor-critic架构,李雅普诺夫稳定性,优化反布控制,强化学习(RL),水面舰艇
CV强化论文分享-20241025-02
强推!这可能是B站最系统的(Python+机器学习+深度学习)系列课程了,上海交大和腾讯联合出品!人工智能|神经网络|AI
强推!这绝对是B站最全的(python+机器学习+深度学习)系列教程,草履虫都能学会,学不会你来锤爆我!人工智能/机器学习/深度学习/python/神经网络
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
用Isaac Lab和OpenUSD加速机器人学习
RLHF基于人类反馈的强化学习动画讲解(LLM)
【Actuate 2024】中文字幕|机器人基础模型 - Robotic Foundation Models|Sergey Levine
Stanford CS234 2024 Spring | 强化学习 | Reinforcement Learning
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
【2024汽车年会】大数据和人工智能:从系统辨识到AI建模 从最优控制到强化学习
我们是如何实现直膝行走的?
g1套humanoid_gym
Go2迷彩套装
Lec8-1: Mujoco Tutorial- 仿真原理,核心模块,与机器人仿真器
测试行走站立切换和站立抗冲击