V
主页
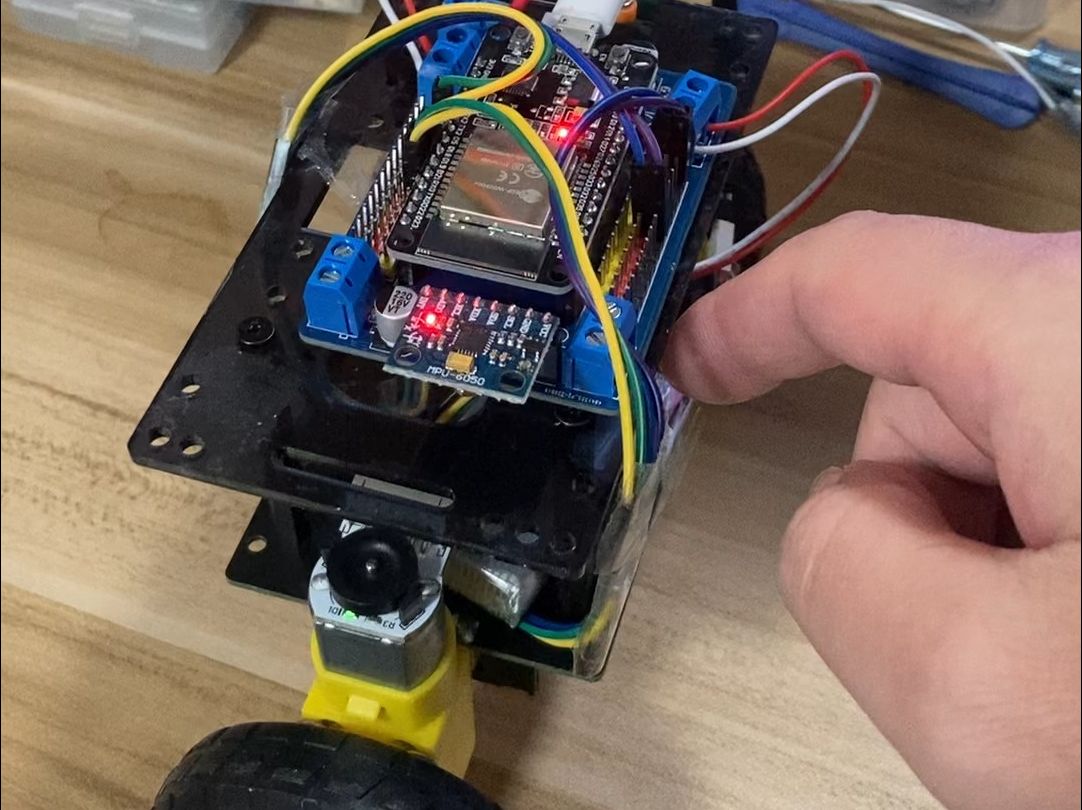
mpu6050,从研究到放弃
发布人
测试失败,mpu6050太难搞了,放弃啦
打开封面
下载高清视频
观看高清视频
视频下载器
MPU6050 dmp库姿态解算
mpu6050滤波,非dmp库解算,解算出来非常稳定的yaw,没有漂移,没有静态累计误差,可移植M0端mcu
2024电赛H题通过mpu6050控制小车转角
惯性传感器MPU9250(MPU6050、MPU9150兼容) mac上位机 实验
MPU6050卡死问题,已解决
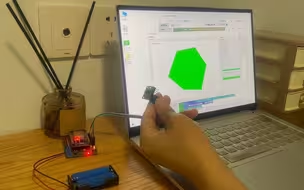
上位机直接搞定mpu6050
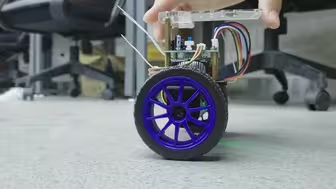
自平衡的双轮小车,通过MPU6050检测到姿态变化,处理器控制电机
MPU6050实时姿态检测
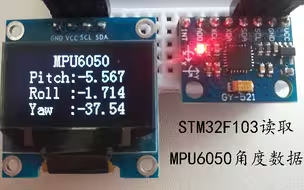
STM32读取MPU6050角度数据
【新玩法】MPU6050传感器实现运动跟踪——略有难度
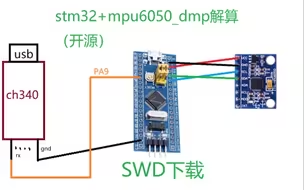
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
毕业设计,两轮平衡车,stm32芯片,mpu6050。
stm32使用IIC读取MPU6050的数据
LabNote: MPU6050 三轴陀螺仪实现手臂关节动作捕捉 + Blender 实时串流同步
stm32 DMP库姿态解算
[开源]江科大框架STM32 MPU6050计步/里程/跌倒实现
做了个机械眼,主控是STM32,用MPU6050体感控制
MPU6050漂移校准解决方案 用Python快速秒杀
MPU6050+DMP获取姿态解析
STM32读取MPU9250姿态数据
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
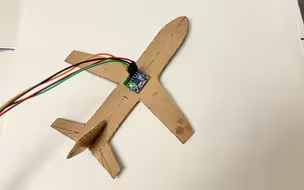
我的飞控动起来了!stm32主控+mpu6050加速度传感器+esp8266WIFI模块遥控
用人话告诉你 mpu6050 电子陀螺芯片怎么使用
[小学生都会的]MPU6050DMP库移植(stm32标准库)
MPU6050用法-角度闭环-STM32-17.2-借助MPU6050 PID闭环朝指定方向运动和旋转指定角度
MPU6050陀螺仪加速度模块完整教程✔ 两个案例演示✔ ✔
MPU6050陀螺仪使用教程(基于Arduino)
震惊!STM32官方DMP库6.12版本竟然能移植到MPU6050上!
【求助】MPU6050使用DMP库yaw角不准
陀螺仪MPU6050内部是如何实现陀螺仪效果的
MPU6050 获取姿态角度信息
(补录)mpu6050三种常见的滤波方法对比 | 卡尔曼滤波、一阶互补滤波、DMP姿态解算
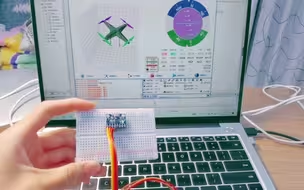
【有手就能做】轻松实现MPU6050位姿传感器数据可视化与保存
MPU6050介绍(干货分享)
arduino mpu6050详细教程(第一节),电子陀螺仪教程,飞控基础
MPU6050(DMP)简单读一下数据
无刷平衡车,静如处子,动如脱兔...
6.代码篇----mpu6050以及PID控制
【平衡小车PID】直立环+速度环完整调参过程
STM32第12次培训(MPU6050)