V
主页
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
CVPR2024开源NeRF-SLAM新SOTA:请任意选择你的高效神经表征和渲染方程?
高斯抛雪球SLAM
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
3DGS进化,高效高质量的GaussianPro来袭!
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
从零搭建一套结构光3D重建系统 [理论+源码+实践]
DoGaussian:分布式训练3DGS,速度提升6倍以上,高质量渲染-上篇
CVPR2024开源NetTrack:跟踪高动态物体!
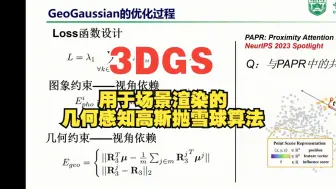
用于场景渲染的几何感知高斯抛雪球算法
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
[IROS2021] TUPPer-Map:用于 3D 语义建图的时间和统一全景感知
大作业|激光-视觉-IMU-GPS融合SLAM算法
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
3.9k star!2张图片重建稠密3D场景!竟然还不需要相机内参!
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
当3DGS遇上可泛化物体位姿估计
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
SGS-SLAM:神经密集SLAM的语义高斯飞溅
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
华为最新工作:RoadMap:用于自动驾驶视觉定位的轻量化语义地图
CVPR'24开源 MASA万能匹配一切、跟踪一切!
CVPR2023|基于深度学习MVS的最新进展 GeoMVSNet
ICRA2021:基于多模态地标统一跟踪的紧耦合激光-视觉-惯性里程计
[群友工作] DimensionX:港科大、清华、生数推出单图加可控视频扩散模型合成逼真的3D和4D场景方法,在真实世界和合成数据数据集上都取得了大幅度提升
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
极快跟踪一切!DOT:无惧遮挡!
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!
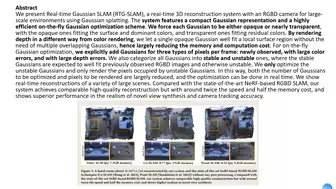
11月15日组会:RTG-SLAM: Real-time 3D Reconstruction at Scale Using Gaussian Splatting
ICRA2022:全局一致且紧密耦合的 3D LiDAR 惯性建图
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
Go!最新NeRF和SLAM结合开源方案!超越NICE-SLAM和DROID-SLAM!
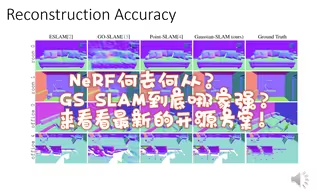
NeRF何去何从?GS SLAM到底哪家强?来看看最新的开源方案!
ICRA2024 牛津提出NeRF融合激光雷达SLAM的大场景重建
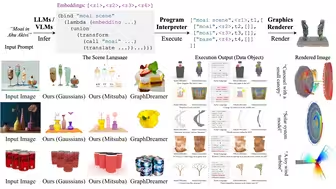
开源 | 场景语言的力量:用程序、单词和嵌入表示 场景,精准描绘3D/4D世界
3DGS 高斯泼溅 6千万高斯超大场景重建