V
主页
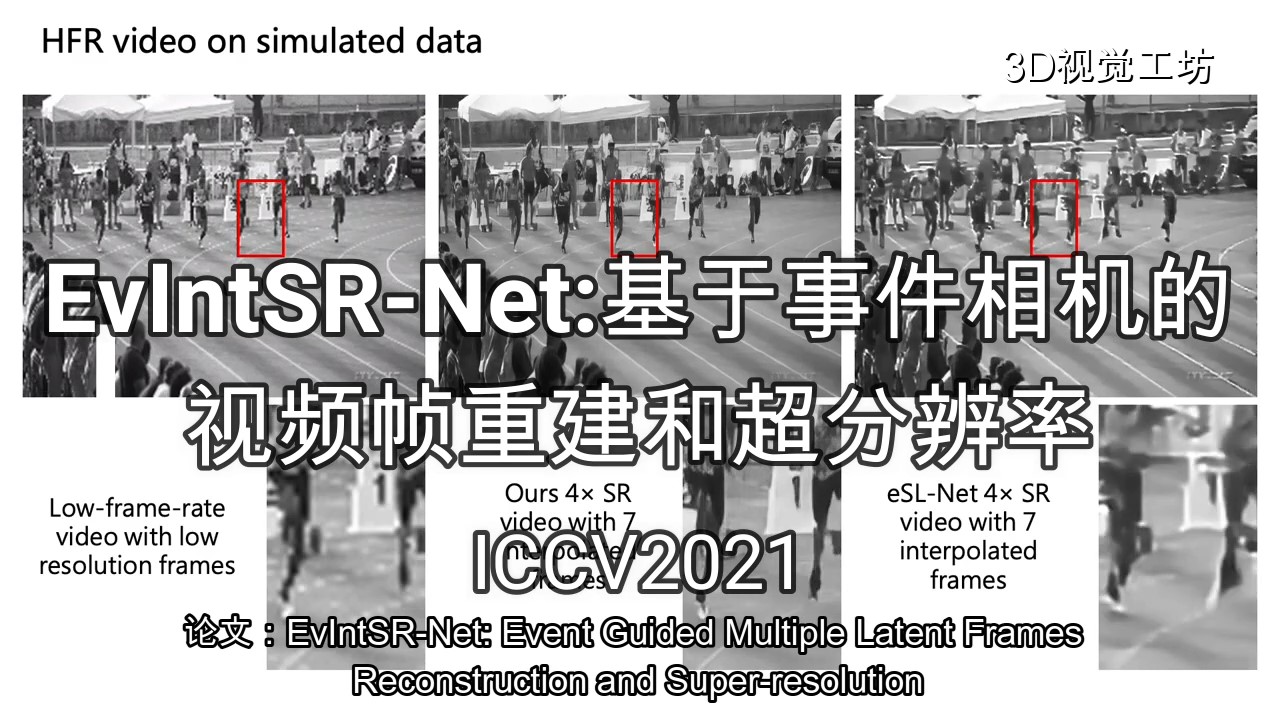
北大工作!基于事件相机的视频帧重建和超分辨率(ICCV2021)
发布人
https://www.youtube.com/watch?v=3Uc1MMiYiO4 事件相机检测场景辐射变化并发送一系列具有高动态范围、高时间分辨率和低延迟的异步事件流,然而空间分辨率有限。 为了从事件数据中重建高分辨率强度图像,本文提出了 EvIntSR-Net,将事件数据转换为多个潜在强度帧, 弥合了事件流和强度帧之间的域差距,并学习以循环更新的方式合并一系列潜在强度帧。 实验结果表明,通过将事件与模拟和真实世界数据的强度帧融合,可以重建具有更高动态范围和更少模糊伪影的SR强度图像。
打开封面
下载高清视频
观看高清视频
视频下载器
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
上海科技大学:IROS2021 | 事件相机快速动态标定
单目深度估计|连续帧方法实战课
中科院最新CityGaussian:VRAR时代的城市重建新标杆
国防科大最新 | DistGrid:基于分布式神经辐射场阵列的大规模场景重建
LVI-SAM代码实战与评估
[非完整版]基于结构光投影三维重建技术系列课程-绪论
最新ICCV2021论文,基于分层内存匹配网络的视频对象分割
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
零基础入门四旋翼建模与控制无人机 | 姿态控制
BEV与Occupancy网络的全景解析与实战
四元数基础
四旋翼无人机-PX4控制算法原理
[CVPR2020] SpSequenceNet:4D点云语义分割网络
BEV&Occ提升颗粒度的方案
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
ICCV2021,浙大工作!遮挡环境下基于学习的未知空间占用分布预测,机器人运动轨迹更加光滑、安全!
面向大尺度室内场景的主动式重建方法(公开课)
重磅开源!连你的微表情都可以轻松还原!SMIRK超强3D面部重建技术!
苏黎世联邦理工:利用事件相机进行单目稠密深度估计
CVPR'24 奔驰DualAD解耦动态和静态世界实现端到端驾驶!
3DGS进化?2DGS颠覆3D场景重建!
戴森机器人实验室发布SuperPrimitive:三维重建&视觉里程计&深度补全轻松搞定!
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
CVPR2024开源NetTrack:跟踪高动态物体!
CoherentGS:从稀疏的输入图像中重建高质量的3D场景
[IROS2021] 使用镜面反射减少机器人视觉系统中的遮挡
如何轻松拿捏LIO-SAM-数学基础篇
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!
大森林-所有指标全面领先!图像-点云配准最新SOTA!CoFiI2P详细介绍!
四旋翼无人机-SO3姿态控制原理
Python数据分析三剑客之NumPy基础
ECCV'24 | 23FPS!超越所有3D检测!港理工ScatterFormer:高效的体素序列处理Transformer
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
[ICCV-2021] 旷视工作!GyroFlow:陀螺仪引导的无监督光流学习
Occupancy的工程细节
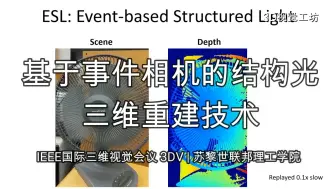
基于事件相机的三维结构光技术ESL,性能好于Realsense技术!
FreeScan Combo 手持扫描仪-01.软件安装
CVPR'24 Symphonies:基于实例级建模的3D场景占用