V
主页
《ROS2 Qt21天训练营第10期》| 人机交互 | ROS | 激光点云 | 导航路径【课程试看】
发布人
本课程总时长10小时,首先讲解了如何从零在ROS2中创建一个基于Qt的GUI功能包,接着介绍如何解析一些ROS常见的话题(地图,激光点云,机器人坐标,导航路径等)并在Qt的ui上显示,最后给大家介绍如何实现在我们的ui界面上实现选点作为导航目标点与重定位点并发布。本视频为试看视频,详细请看:https://zyesr.xet.tech/s/uVp1v
打开封面
下载高清视频
观看高清视频
视频下载器
基于ROS2 Qt实现话题的可视化绘制显示【课程试看】
《ROS自动驾驶障碍物检测》| 激光雷达 | 数据集 | 算法优化 | 3D视觉【课程试看】
【公开课】 古月• 第一讲《TogetherROS移动机器人应用开发流程》| 智能小车| SLAM地图构建| ROS2
【2.TogetherROS系统安装与配置】基于ROS2 | 更强的AI能力 | 开源系统
PID参数整定与模糊自适应PID【课程试看】
面向机器人的任务与路径规划 -田浩|2021ROS暑期学校 第七天精剪回放
前沿| 庆祝苏黎世大学机器人与感知小组成立10周年
MuJoCo机器人强化学习仿真入门|从零开始的MuJoCo世界生活之强化学习篇【课程试看】
ROS World 2021 机器人操作系统开发者大会视频集
前沿|长指甲的机器人—Sanctuary
《面阵激光雷达SLAM》| C++| livox-loam、fastlio、r3live【课程试看】
3、4自由度机械臂正逆解推导与代码实现 【课程试看】
【公开课】 古月• 第四讲《TogetherROS移动机器人视觉应用》 | 智能小车| SLAM地图构建| ROS2
《从零开发智能小车》| 嵌入式| ROS驱动| 机电设计| 人工智能| 小车的应用功能【课程试看】
【古月居】ROS机器人开发案例
【公开课】 古月• 第六讲《TogetherROS移动机器人自主导航》 | 智能小车| SLAM地图构建| ROS2
关于手内操作的Roller Grasper V2的设计与控制
【3.TogetherROS系统通信方法】基于ROS2 | 更强的AI能力 | 开源系统
【古月居】ROS机械臂开发原理
《PyTorch入门:一起从零搭建神经网络 》ROS| 网络项目开发| pycharm| 环境搭建【课程试看】
前沿 | MIT教机器人捏橡皮泥?
前沿|类人机器人Phoenix,用手打开塑封袋
【直播回放】第1期|开源项目机器狗训练营——机器狗基础知识
OriginBot智能机器人开源套件使用指南
如何将ROS用于实际机器人开发-李江浩|2021ROS暑期学校 第三天精剪回放
基于ROS的无人车开发实践课程-田博|2021ROS暑期学校 第三天精剪回放
《基于MATLAB的十字路口交通流仿真》| 道路场景建模 | 协同控制算法设计 | StatFlow【课程试看】
【机器人&ROS】古月居访谈 —— 擎朗机器人 · 李通
前沿|移动机械臂 送水不洒的同时还能躲避球
ROS平台下 FRANKA EMIKA 机器人实例展示 - 潘工|2021ROS暑期学校 第七天精剪回放
前沿|根据音乐规划机器人的跳舞动作
前沿| MIT造出“厘米级”类昆虫机器人,断翅也能飞!
前沿 | 直接物理示教足式机器人学习灵敏动作
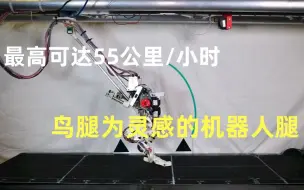
前沿|加州大学最新成果!类鸟机器人 BirdBot,四分之一的能量可达55公里/小时
AI开发,何必从零开始?地平线旭日X3派开发板-更强的算力国产树莓派替代
前沿| 华盛顿大学开发出定制抓手,帮助机器人拿起几乎任何东西
前沿|爬楼、过泥坑的机器人,只有你想不到没有Ascento做不到
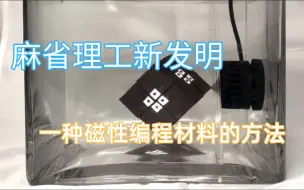
前沿| MIT使用可重新编程的磁性像素进行选择性自组装
强化学习导航:仿真环境训练及ROS实车部署
ROS-Industrial原理与工业应用 - 胡春旭|2021ROS暑期学校 第七天精剪回放