V
主页
前沿| 庆祝苏黎世大学机器人与感知小组成立10周年
发布人
https://rpg.ifi.uzh.ch 这个视频是为了庆祝由大卫 · Davide Scaramuzza教授领导的苏黎世大学机器人和感知小组成立10周年。该实验室成立于2012年。超过300人在我们的实验室工作,作为理学士/理硕士/博士生,博士后和访问研究人员。我们感谢他们为我们的研究做出的贡献。 该实验室为微型飞行器的自主、敏捷的基于视觉的导航以及移动机器人和计算机视觉的事件摄像机做出了重要贡献。实验室里诞生了三个初创企业和创业项目: 第一个,苏黎世之眼(Zurich Eye) ,成为了 facebook-Meta Zurich,为虚拟现实耳机 Oculus Quest 的开发做出了贡献; 第二个,Fotokite,为急救人员制造系绳无人机; 第三个,SUIND,为精细农业制造基于视觉的无人机。 我们的研究人员获得了50多个奖项,其中包括四次入围和一次获得乔治 · 吉拉特最佳博士学位。论文奖,两个 SNSF 和 ERC 资助,Facebook,库卡,高通,英特尔奖,两个美国宇航局技术简报奖,和许多纸质奖。我们的实验室成员已经发表了100多篇科学论文,被引用了超过35000次,并且已经在许多媒体上发表,包括《纽约时报》、《福布斯》和《经济学人》。 我们还发布了超过85个开源软件包、数据集和工具箱,以进一步加快科学进步和研究的可重复性。我们的算法启发了很多产品和公司,包括美国国家航空航天局、大疆、博世、尼康、 Magic Leap、 Meta-Facebook、华为、索尼和希尔蒂。感谢您关注我们的研究!
打开封面
下载高清视频
观看高清视频
视频下载器
前沿 | MIT教机器人捏橡皮泥?
前沿| 牛津大学在机器人骨架上训练人类肌肉
【古月居】ROS机器人开发案例
前沿| 华盛顿大学开发出定制抓手,帮助机器人拿起几乎任何东西
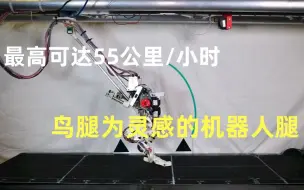
前沿|加州大学最新成果!类鸟机器人 BirdBot,四分之一的能量可达55公里/小时
前沿| 看看有史以来最美味的机器人
前沿|爬楼、过泥坑的机器人,只有你想不到没有Ascento做不到
OriginBot智能机器人开源套件功能演示
前沿|无人机羽毛球——低视力人群运动的福音
前沿|创意机器人——通过膨胀或收缩车轮主动改变形状
前沿|用于柔性机器人分布式控制的非线性充气执行器
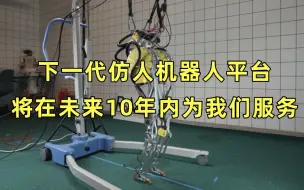
前沿 | ARTEMIS: 先进的机器人技术提高了移动性和稳定性
前沿|一个电机和机翼就能做无人机?
本科阶段最后一次竞赛Vlog——2024年智能车大赛智慧医疗组
前沿| 蓖麻油,让软体机器人获得自愈功能!
前沿| Ammeca机器人连接GPT 3,回复变得有意义
前沿|最简单的猴子摆机器人
3、4自由度机械臂正逆解推导与代码实现 【课程试看】
前沿| 用机械臂做篮球架!这能不进球?
前沿| 机器人擦桌子,真的比人类强吗?
OriginBot智能小车完整安装演示
前沿| MIT造出“厘米级”类昆虫机器人,断翅也能飞!
前沿|新机器人系统助外科医生远程治疗中风,登上《Science Robotics》!
《ROS2 Qt21天训练营第17期》| 人机交互 | ROS | 激光点云 | 导航路径【课程试看】
前沿| 可进行自我形态的全身视觉建模机器人
【机器人&ROS】古月居访谈 —— 擎朗机器人 · 李通
前沿|长指甲的机器人—Sanctuary
OriginBot开源智能小车,支持ROS2/TogetherROS,算力强劲性能爆表,创客性价比之选!
前沿|类人机器人Phoenix,用手打开塑封袋
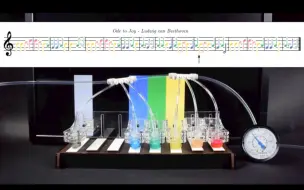
前沿|根据音乐规划机器人的跳舞动作
前沿|第一个具有机载感知能力和和操纵能力的扑翼机器人
前沿| Skydio Dock无人机,让环境感知不再困难
前沿| ANCILLARY项目,DARPA展示飞行器关键技术
前沿|先进的月球机器人漫步车“R1”,勘探、采矿不在话下!
前沿|执行能力相当于3岁孩子的机器人—AI agent
前沿| 人类引导下的贝叶斯学习—突破机器人运动规划的难题
前沿|甲虫形无人机?外形有点萌
前沿|ROSE—酷似玫瑰的新型柔性抓取器
前沿|未来的自重构机器人
MuJoCo机器人强化学习仿真入门|从零开始的MuJoCo世界生活之强化学习篇【课程试看】