V
主页
京东 11.11 红包
【RAL 2023】HybGraps:用于高效机器人抓取的混合学习自适应夹爪结构
发布人
HybGrasp: A Hybrid Learning-to-Adapt Architecture for Efficient Robot Grasping DOI: 10.1109/LRA.2023.3329622
打开封面
下载高清视频
观看高清视频
视频下载器
【TRO 2023】用于运动生成的动态优化结构
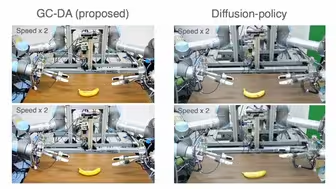
【TRO 2024】基于属性的数据高效自适应机器人抓取
【CoRL 2023】Diff-LfD:基于接触感知模型的机器人操作视觉演示学习
【ICRA 2023】基于触觉运动基元的电缆布线和装配
【TRO 2023】扰动和未知动力学条件下稳健抓握和手部操作的自适应手指协调
【TRO 2024】灵巧双臂机器人操纵的目标条件双臂动作模仿学习
【ICRA 2023】机器人抓取的实例抓取合成
【IJRR】贝叶斯机器人控制器融合:在深度强化学习中利用控制先验
【IJRR2023 & RSS2020】用于奖励学习和优化的基于主动偏好的高斯过程回归
告别小碎步!宇树Unitree G1人形机器人2天学会仿人自然行走!
【RSS 2023】来自人类视频的结构化世界模型
【CoRL 2023 oral】Koopman算子理论在灵巧操作技能学习中的应用
【TRO 2024】用于灵巧操作的任务驱动混合模型降阶
【MIT Sangbae Kim团队】利用高带宽传感和驱动实现具有反射的鲁棒自主抓取
【CoRL-2019】MAT:基于深度强化学习的多指自适应触觉抓取
【RAL-2022】视触融合物体6D位姿估计
【TRO 2023】 机器人接触式杂耍
【CoRL 2023 oral】MimicPlay:通过观察人类演示实现长序列模仿学习
【CoRL 2022】ISAGrasp:通过隐式形状增强学习强大的现实世界灵巧抓取策略
特斯拉新发布的机器人已经有点那啥了‼️
【NeurIPS 2023 Workshop】通过价值函数预训练从互联网视频中获得机器人离线强化学习
【ICRA 2023】基于子步指导的图像自主真实世界RL的灵巧操作
【ICRA 2023】在线增强习得的抓取序列策略提高手部工具操作的适应性和数据效率
【MIT MCube Lab】simPLE:一种在模拟中学习的视触融合操作方法
【TRO 2023】基于模仿和对比学习的稳定运动原语
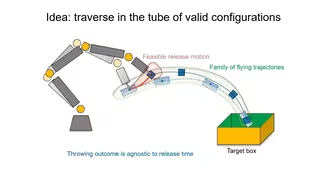
【TRO 2024】针对释放不确定性的稳健灵巧投掷
【ICRA 2023】解耦技能学习与机器人控制实现可推广的对象操作
【RSS 2023】机器人在职学习:部署期间的人机交互自主和学习
【RSS 2022】DexTransfer: 使用少量的人类演示的真实世界的多指灵巧抓取
【ICRA 2023】厨房中的人类掌握和操作数据收集的自动注释、洞见和度量
【CoRL 2022】从视频学习人手姿势先验的灵巧抓握
机械手爬行
【ICRA 2023】SGTM 2.0:使用交互式感知自动解开长电缆
【TRO 2023】基于采样的移动机器人与铰接对象交互的鲁棒控制
这才是人民群众需要的科技发明
【RSS 2023】行为检索:通过查询未标记的数据集进行少样本模仿学习
LOTUS:通过无监督的技能发现实现机器人操作的持续模仿学习
【RSS 2023】一分钟演示实现机器人多用途模仿学习
【Learning_and_adaptive_control】Lesson 4-Part 2 SEDS