V
主页
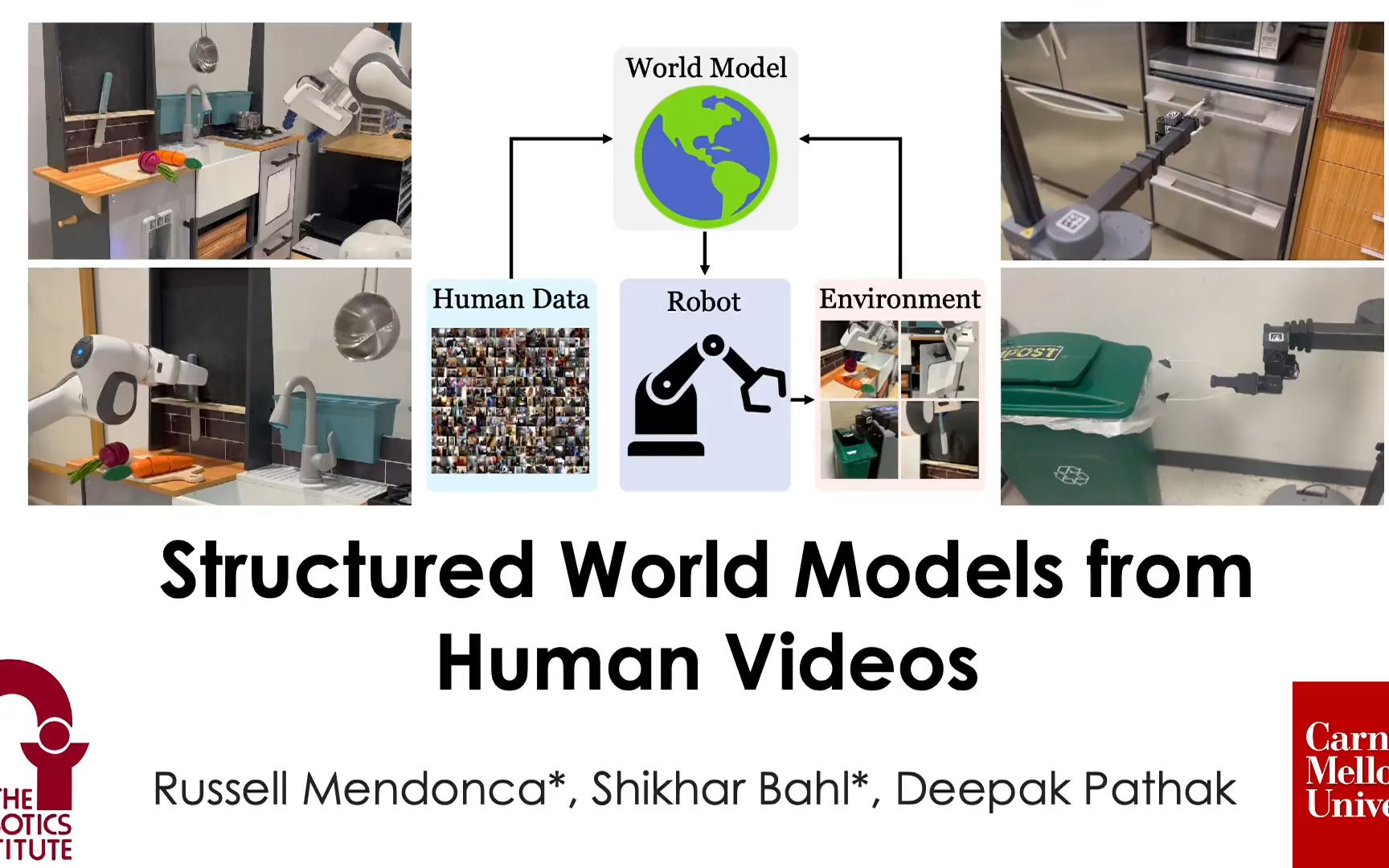
【RSS 2023】来自人类视频的结构化世界模型
发布人
Structured World Models from Human Videos 该文构建了一个结构化的、以人为中心的行动空间,基于从人类视频中学习到的视觉启示。此外,在人类视频上训练一个世界模型,并在没有任何任务监督的情况下对少量的机器人交互数据进行微调。这种提供-空间世界模型的方法,使不同的机器人能够在复杂的环境下,在不到30分钟的交互中学习各种操作技能。
打开封面
下载高清视频
观看高清视频
视频下载器
【TRO 2023】力调制操作的实时可变形接触感知模型预测控制
【TRO 2023】基于模仿和对比学习的稳定运动原语
【CoRL 2023】Diff-LfD:基于接触感知模型的机器人操作视觉演示学习
【TRO 2023】 机器人接触式杂耍
【MIT MCube Lab】simPLE:一种在模拟中学习的视触融合操作方法
【CoRL 2023 oral】MimicPlay:通过观察人类演示实现长序列模仿学习
【CoRL 2022】从视频学习人手姿势先验的灵巧抓握
【TRO 2024】用于灵巧操作的任务驱动混合模型降阶
【TRO 2023】用于运动生成的动态优化结构
【ICRA 2023】解耦技能学习与机器人控制实现可推广的对象操作
【TRO 2023】使用路径集规划和跟踪的带约束的可变形对象操作
【TRO 2023】扰动和未知动力学条件下稳健抓握和手部操作的自适应手指协调
【RAL 2023】HybGraps:用于高效机器人抓取的混合学习自适应夹爪结构
【ICRA 2023】机器人抓取的实例抓取合成
【IJRR2023 & RSS2020】用于奖励学习和优化的基于主动偏好的高斯过程回归
【CVPR 2023】可供性扩散:合成手-对象交互
【TRO 2024】基于属性的数据高效自适应机器人抓取
【ICRA 2023】基于触觉运动基元的电缆布线和装配
【TRO 2024】灵巧双臂机器人操纵的目标条件双臂动作模仿学习
【CoRL 2023 oral】Koopman算子理论在灵巧操作技能学习中的应用
【IJRR】贝叶斯机器人控制器融合:在深度强化学习中利用控制先验
【RSS 2022】DexTransfer: 使用少量的人类演示的真实世界的多指灵巧抓取
【ICRA 2023】厨房中的人类掌握和操作数据收集的自动注释、洞见和度量
【ECCV 2022】 DexMV:从人类视频进行灵巧操作的模仿学习
【RSS 2023】一分钟演示实现机器人多用途模仿学习
【Science Robotics】视觉灵活性:在手中重新定位新颖和复杂的物体形状
【ICRA 2017】结合自监督和模仿的视觉绳索操作
【RSS 2023】行为检索:通过查询未标记的数据集进行少样本模仿学习
【TRO 2023】基于采样的移动机器人与铰接对象交互的鲁棒控制
【NeurIPS 2023 Workshop】通过价值函数预训练从互联网视频中获得机器人离线强化学习
人类寿命即将翻倍?!【诺贝尔奖2024】
【ICRA 2023】SGTM 2.0:使用交互式感知自动解开长电缆
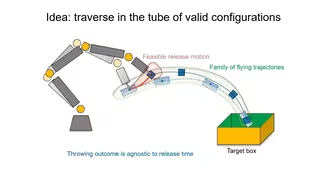
【TRO 2024】针对释放不确定性的稳健灵巧投掷
【TRO 2016】 Hierarchical Fingertip Space: 抓握规划和手部抓握适应的统一框架
【RSS 2023】GenAug:通过生成增强将行为重定向到未知情况
【RSS 2023】机器人在职学习:部署期间的人机交互自主和学习
【ECCV 2022】用于三维表示的表面编码隐式潜在划分
【ICRA 2023】基于子步指导的图像自主真实世界RL的灵巧操作
LOTUS:通过无监督的技能发现实现机器人操作的持续模仿学习
【ICRA 2023】通过速度反馈内环整形提高工业机器人导纳性能