V
主页
京东 11.11 红包
7-7视觉SLAM简介
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
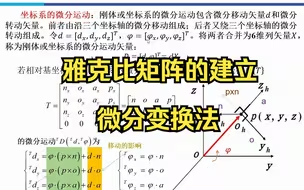
4-7雅克比矩阵的建立-微分变换法
SLAM-Viewer,SLAM便捷可视化小工具
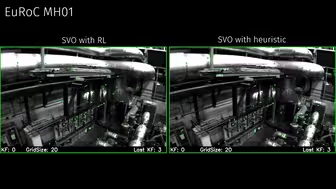
强化学习给视觉里程计自适应调参
3-7DH4个参数的练习
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
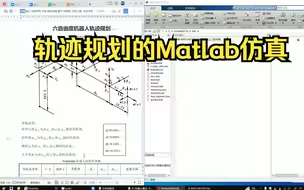
6-13轨迹规划的Matlab仿真
完
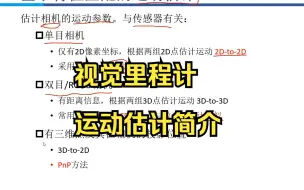
6-13视觉里程计-运动估计简介
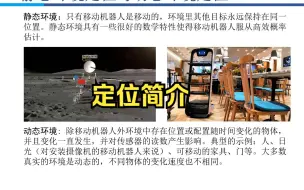
7-1定位简介
视觉惯导融合SLAM内外参标定是关键
轮式里程计激光里程计视觉里程计区别是什么
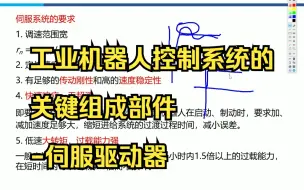
7-7工业机器人控制系统的关键组成部件-伺服驱动器
7-2SLAM简介
SLAM Zero to One
SLAM为什么需要IMU
6-7激光里程计的迭代最近点ICP算法简介
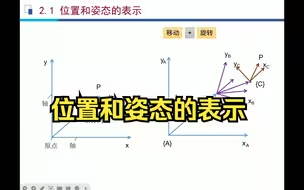
2-1位置和姿态的表示
DOM-60 为机器人带来前所未有的感知能力
6-9视觉里程计简介
4-1机器人速度雅可比矩阵
3-11运动学逆解
1.课程简介
8-10传感器--视觉传感器
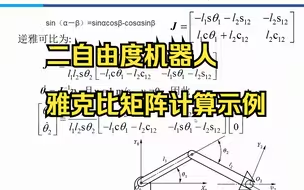
4-3二自由度机器人雅克比矩阵计算示例
Fast LIVO 硬同步过程释疑
听劝不要轻易入坑SLAM
6-11笛卡尔空间直线插补
3-19六自由度机器人Matlab机器人工具箱建模
VINS算法视觉惯导融合SLAM
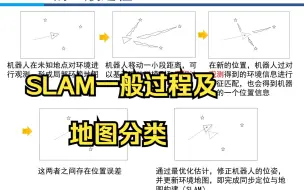
7-4SLAM一般过程及地图分类
3-14三自由度机器人Matlab机器人工具箱建模
2-2坐标变换
GPS+IMU+3D激光建图
SLAM为什么需要闭环检测
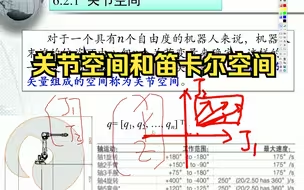
6-2关节空间和笛卡尔空间
7-3SLAM系统框架
4-11机器人动力学简介
3-12运动学逆解示例:PUMA560
00 移动机器人定位与导航/移动机器人技术基础-课程简介