V
主页
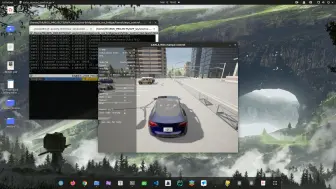
基于ROS2的自动驾驶决策规划系统--深度强化学习决策--Lattice规划--MPC控制
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
fast_planner实车测试
使用Carla和ros2复现B站up主忠厚老实的老王规控教程—完结
【基础】自动驾驶控制算法第一讲 绪论与前期准备
开源端到端轨迹规划(华为昇腾310B部署+CARLA仿真)
轻量级道路特征地图(开源了)
端到端决策规划现状与挑战--自动驾驶之星第六次活动
【Carla】Hybrid A* 寻路算法演示
基于ROS2运行LIO-SAM,实现地下车库SLAM
千万不要做数据标注!!!
PID、LQR、MPC实时控制倒立摆仿真对比
聚类 + 循迹 + 避障 + 路线跟踪
基于DRL的自动驾驶决策规划(highway env)
自动驾驶-规划控制-Apollo-Lattice-LQR-算法分析
自动驾驶路径规划-控制决策入门学习
ros小车搭建
24届自动驾驶算法薪资曝光!!!
自动驾驶公司Momenta办公环境
我大抵是难毕业了,效果巨烂。Yolov5+deepsort+1DCNN
nvidia自动驾驶模拟器渲染效果演示,光照质感真的非常nb!
Yolo v8惊人的目标识别能力
自动驾驶泊车规划
Autoware:自动驾驶开源软件项目|2022【The Autoware Foundation】
MPC + 强化学习![ICRA 24] Actor Critic Model Predictive Control
特斯啦:让你tm随意横穿马路!
基于MPC的自主泊车轨迹跟踪Carla仿真
ROS入门选择性学习思路,合理跳过指南
路径规划
最强可视化!5分钟14个结点实现自动驾驶
carla环境下基于强化学习的自动驾驶
道路化场景下的自动驾驶运动规划
学到了这些,证明你已经掌握了ROS的基本技能
基于ROS的扫地机器人仿真
ROS2|多传感器数据采集|无人车|LiDAR|SLAM|IMU|Odometry
Carla中实现强化学习PPO算法
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
985自动驾驶专业博士真实就业情况分享
基于强化学习的机器人控制策略
试试YoloV5的实时推理
路径规划|比A*快百倍的跳点搜索JPS算法(ROS/Python/Matlab仿真)
自动驾驶决策规划论文交流(三)自动驾驶端到端论文