V
主页
国内智驾老兵百度开源BEVWorld:通过统一BEV潜在空间实现自动驾驶的多模态世界模型
发布人
+“SLYYDS24”,【24年100篇最新智驾论文➕多领域面试真题➕公开课课件回放➕高质量交流群】,备<100> 本文提出的BEVWorld框架通过统一的BEV潜在空间构建多模态世界模型,能够在自监督学习范式下高效处理未标注多模态传感器数据,实现对驾驶环境的全面理解。实验结果表明,BEVWorld在下游自动驾驶任务中表现出色,并在多模态未来预测中取得满意结果。 标题:BEVWorld: A Multimodal World Model for Autonomous Driving via Unified BEV Latent Space 链接:https://arxiv.org/abs/2407.05679
打开封面
下载高清视频
观看高清视频
视频下载器
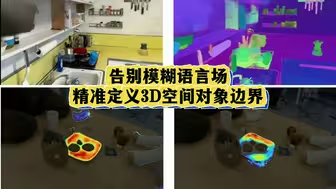
CVPR 2024 Highlight【清华、哈佛】|LangSplat:3D语言高斯溅射,告别模糊语言场,精准定义3D空间对象边界
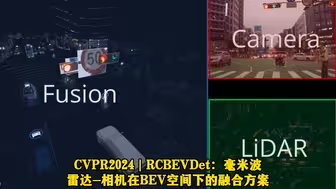
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
自动驾驶主流感知范式:BEV
CVPR24 最佳学生论文:实现3DGS新突破,任意尺度无锯齿渲染!三名华人学者参与!
华为诺亚发布!MagicDrive3D适用于街景中的任意视图渲染的可控制的3D生成技术
浙大最新开源!HVOFusion:使用混合体素八叉树进行增量网格重建
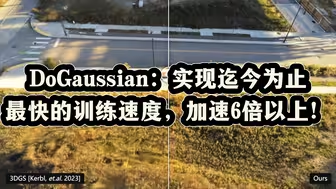
3DGS界的新秀? DoGaussian:实现迄今为止 最快的训练速度,加速6倍以上!【可在主页预约四场公开直播课】
Yann LeCun点赞转发,StableIdentity: 只需一张图片即可把任意 人像插入到任意场景中
3DGS技术在水下:实现散射介质中的高质量场景快速重建!
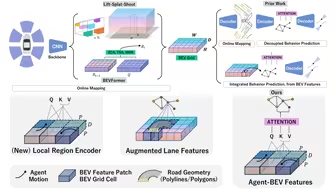
ECCV'24 | "突破传统",通过直接BEV特征注意力加速在线建图和行为预测
ECCV'2024 北航、极氪领衔 | FSD-BEV:大幅度提升基于视觉的3D目标检测算法性能,实现感知新SOTA!
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
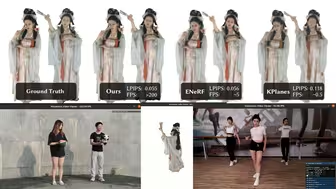
CVPR'24 | 4K分辨率实时4D 视图合成,好于eNeRF30倍并达到了最先进的渲染质量
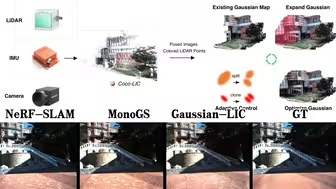
浙大TUM联合出品|Gaussian-LIC:首个LiDAR-IMU-Camera融合的3DGS-SLAM系统
CVPR2024 | SG-BEV:用于跨视图语义分割的卫星引导BEV融合,可实现精细的建筑属性分割
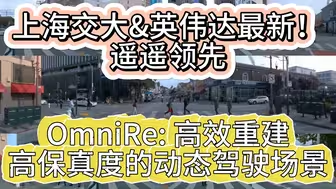
上海交大&英伟达最新!遥遥领先 | OmniRe: 高效重建高保真度的动态驾驶场景
OPPO和港中文大学推出GlyphDraw2,多文字海报生成如此简单!使用扩散模型和LLM自动生成复杂字形海报的端到端方案
【已开源】秦通课题组新作入选IROS24!开启实车端到端泊车革命!
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
为什么说Shodan最可怕的搜索引擎
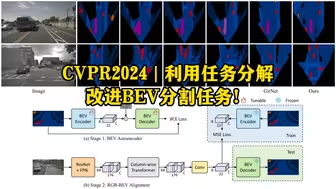
CVPR2024 | 利用任务分解改进BEV分割任务!
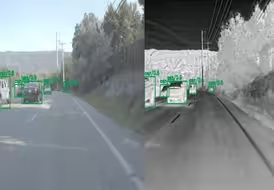
多模态YOLOv8 融合可见光+红外光(RGB+IR)双输入 完整代码见评论区
基于图像的3D重建方法:无需COLMAP的3D高斯Splatting技术
首篇统一户外+室内3D检测框架推出,CVPR2024 | UniMODE:统一单目3D物体检测
黑神话·悟空爆火,有哪些AI技术在助力?
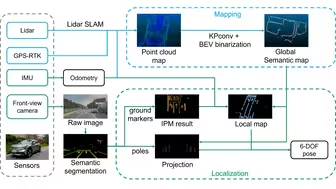
ICRA 2024 | 探索基于语义地图 的自动驾驶汽车单目定位技术
【免费】自动驾驶仿真实践:Apollo&CARLA联合仿真: L1 Apollo架构
北大 | 文本驱动、全景世界文生3D全景世界大模型为元宇宙和VR带来新机遇
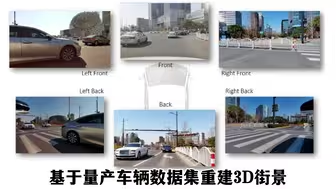
T-ITS | 秦通团队 Crowd-Sourced NeRF: 基于量产车辆数据集重建3D街景
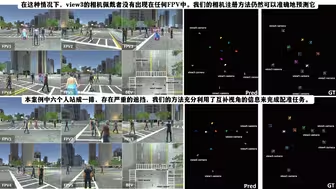
CVPR'24 | BEVSee: 无需相机校准的联合相机 和拍摄对象配准
与CityDreamer相比速度提高60倍!GaussianCity:重建你的无人机视图与自动驾驶场景【可在主页预约四场与”3DGS ”相关的公开直播课
拒绝失真,个性化人脸图像修复方法——双支点调节技术
CVPR'24开源 | NeRF正式占领LiDAR新视角合成!LiDAR4D:用于新型时空视图LiDAR合成的动态神经场
开着自动驾驶汽车的你能想到有多少种感知技术在为你保驾护航吗?
5秒产出高质量3D物体的大型多视角高斯模型LGM,代码和模型权重均已开源,研究者还提供了一个在线 Demo 供大家试玩
AI在医疗领域的新突破:浙江大学团队提出并成功研制出了AI辅助驾驶气管镜机器人
CVPR'24 Highlight 北大 | 扩展动态人景交互建模新突破, 生成的动作质量均优于现有技术
ECCV'24 | OpenIns3D:无需2D图像的3D场景理解技术,随意处理复杂推理和文本查询
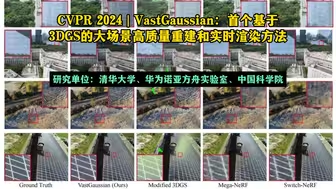
CVPR 2024 | VastGaussian:首个基于3D GS的大场景高质量重建和实时渲染方法,出自清华大学、华为诺亚方舟实验室、中国科学院
全球最大单笔智能驾驶重卡交付 | 中通快递400台