V
主页
浙大最新开源!HVOFusion:使用混合体素八叉树进行增量网格重建
发布人
#......vx添加“SLYYDS24”,获取最新面试题。添加时请备注【B站】优先通过......# 传统的增量场景重建方法通常利用TSDF体积或神经网络来隐式表示表面,这种方法很难平衡速度、内存存储和表面质量。对此,来自浙江大学的研究团队,提出了一种新颖的混合体素 八叉树方法,有效地将八叉树与体素结构融合,使他们能够同时利用隐式表面和显式三角网格表示。 标题:HVOFusion: Incremental Mesh Reconstruction Using Hybrid Voxel Octree 链接:https://arxiv.org/html/2404.17974v1
打开封面
下载高清视频
观看高清视频
视频下载器
3DGS技术在水下:实现散射介质中的高质量场景快速重建!
NeurlPS'24开源 | GaussianCube 一种用于三维生成建模的结构化和 显式辐射表示,引领三维重建新范式
Gaussian-Flow:使用动态3D高斯粒子进行4D重建
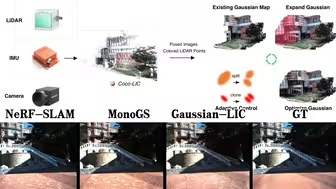
浙大TUM联合出品|Gaussian-LIC:首个LiDAR-IMU-Camera融合的3DGS-SLAM系统
NeurlPS'24 开源 | DC-Gaussian,基于3DGS的行车记录仪视频场景重建,有效去除反射遮挡
视觉惯性-压力SLAM:水下考古遗址在线稠密三维重建
关于3DGS的最新综述,3D重建与新型视图合成
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
GaussianPro:具有渐进传播的3D高斯泼溅,该方法在Waymo数据集上明显超越了3DGS
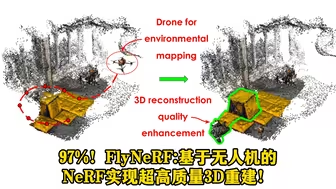
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
FreeScan Combo 可以重建人体的手持扫描仪
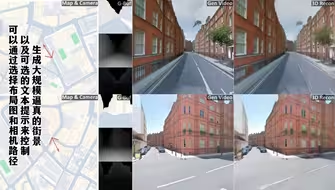
SIGGRAPH 2024 | Streetscapes:谷歌&斯坦福高调喊话:为智驾公司节省高开支,轻松实现“大规模街景生成
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
基于图像的三维重建
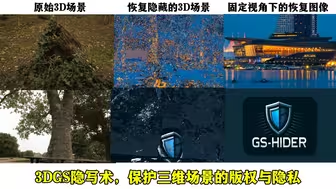
3DGS隐写术—GS-Hider,用以保护三维场景的版权与隐私【可在主页预约与3DGS相关的两场直播公开课】
计算机视觉最不卷的方向:三维重建学习路线梳理
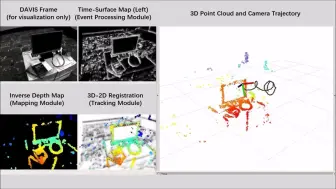
港科大沈劭劼组最新开源:双目事件相机视觉里程计!
单目视频/图像重建高质量人头数字人
NeurlPS'24 开源 | 使用VoxSplats 进行即时大规模场景重建,仅用3张 图像就可在20秒内重建百米大场景
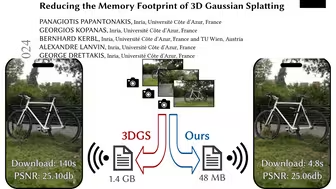
3DGS官方团队新作!减少3DGS内存占用,可达29.87倍压缩,渲染速度提高1.7倍!
最新开源MVSGaussian:基于多视角 立体图像的快速通用高斯溅射重建 训练提速13倍,渲染300+FPS
MicroDreamer :20s零样本 生成3D mesh,显著降低3D物体 生成的神经网络迭代次数
你现在可以360°无死角探索国际空间站了
ECCV'24 | FPV-NeRF,Meta的新视图合成方法,为无人机空间感知带来革命性提升
[群友工作] DimensionX:港科大、清华、生数推出单图加可控视频扩散模型合成逼真的3D和4D场景方法,在真实世界和合成数据数据集上都取得了大幅度提升
菌子还是吃少了!!
[群友工作] LSM: UTAustin, nVidia在NeurIPS等推出端到端的稀疏无位姿图片输入的三维重建,可实现几何、外观和语义的实时重建效果
自动驾驶主流感知范式:BEV
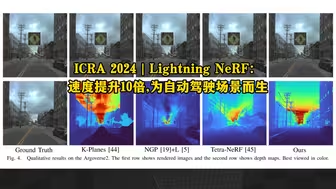
ICRA 2024|Lightning NeRF:速度提升10倍!为自动驾驶场景而生
Blender vs Cinema 4D vs 3Ds Max vs Maya vs Houdini
NeurlPS'24开源 | RealMotion捕捉时空交互关系,为自动驾驶提供连续、精准的运动预测
3D OPGS高质量成果展示三
(清华&英伟达)高保真度!DriveEnv-NeRF:基于NeRF搭建真实自动驾驶环境
重建大师 7.0 OPGS成果细节展示一
2024年后打算入坑程序员的请注意:千万别碰这5种即将被IT行业淘汰的编程语言!【马士兵】
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
ECCV'24 Oral | MVSplat:从稀疏多视图图像中实现高效的3DGS,用更少的参数,速度快2倍,还能跨数据集泛化
继3D高斯抛雪球法之后,4D高斯抛雪球模型问世,单视图视频也能快速生成动态3D对象了
70年老算法Dijkstra被证明普遍最优 斩获顶会FOCS 2024最佳论文
篡改猴更新后无法使用?打开这个设置直接升天↑