V
主页
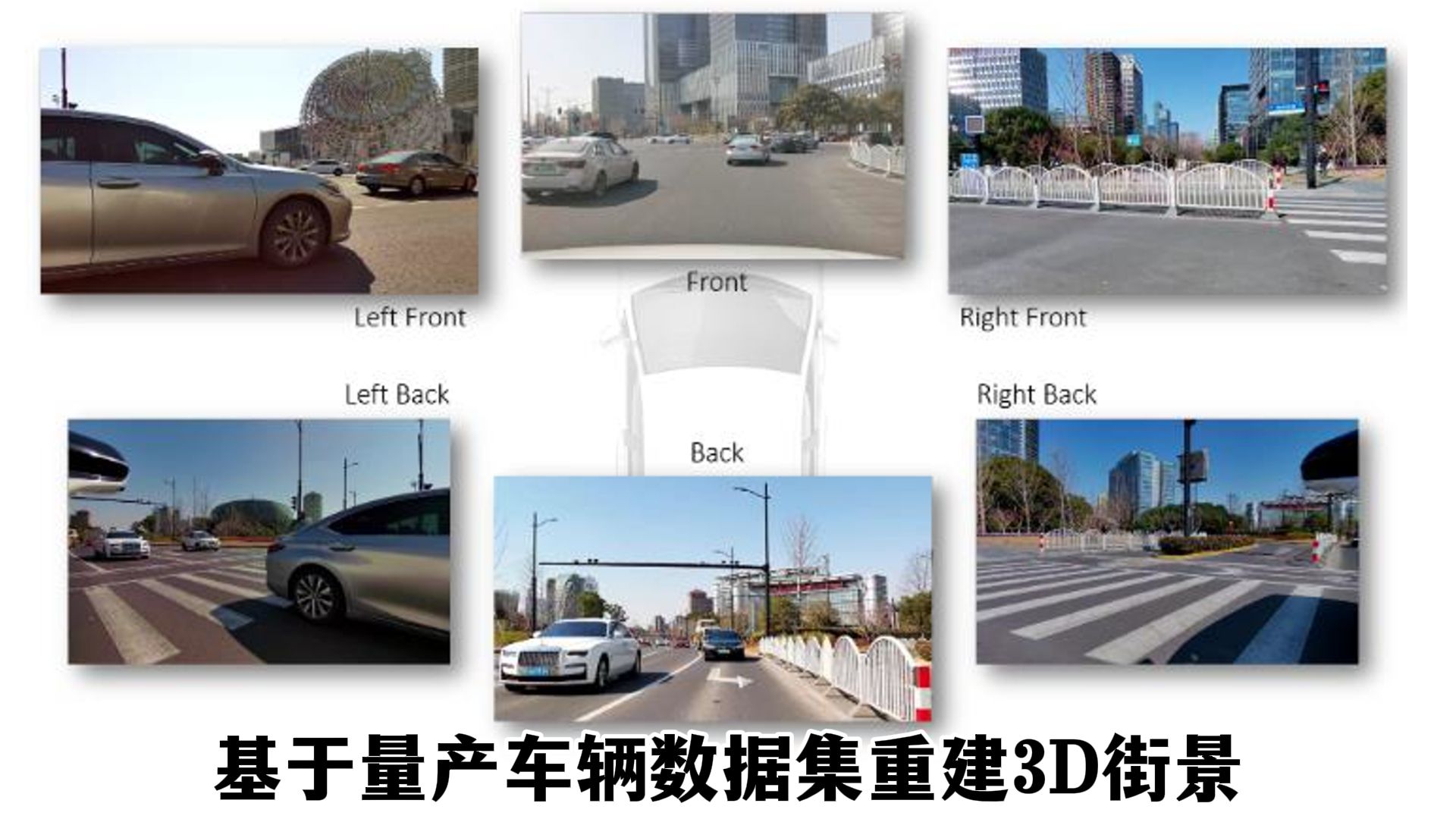
T-ITS | 秦通团队 Crowd-Sourced NeRF: 基于量产车辆数据集重建3D街景
发布人
{加“SLYYDS24”,领【24年100篇最新智驾论文➕多领域面试真题➕公开课课件回放➕高质量交流群】} 这篇文章介绍了一个名为Crowd-Sourced NeRF的新方法,用于通过生产车辆收集数据来重建3D街景。该系统利用多台普通生产车辆上的摄像头,结合GPS、IMU等传感器收集的数据,通过众包方式实现广泛的数据覆盖。实验选择了上海世纪大道交叉口区域的数据,涵盖了多个季节和时间段,展示了该方法在复杂路况下的应用。 标题:Crowd-Sourced NeRF: Collecting Data from Production Vehicles for 3D Street View Reconstruction 链接:https://arxiv.org/html/2406.16289v1
打开封面
下载高清视频
观看高清视频
视频下载器
日媒报道中国自动驾驶技术称导致失业危机 网友这样说
第16场 中国科学技术大学 RoboWalker战队 vs 国防科技大学 军临战队 RoboMaster 2024 超级对抗赛·港澳台及海外赛区&复活赛
自爆蜘蛛机器人,在外网震惊网友:说这要是用于战争很可怕!
小小赛的家有个奥特曼机器人。
公众号爆文输出AI机器人,2分钟一篇原创文章,自动生成文章自动发布,解放双手,保姆级搭建教程
假如给你10个亿,挑战7天只用一种洗发水,你选哪个?#ai #ai绘画 #脑洞大开 #万万没想到 #人工智能
机器人送餐遇上了碎尸,结果自己还是受害机!
Science Robotics 香港城市大学与香港科技大学开发了具有协同混合运动的敏捷单足跳跃四轴飞行器
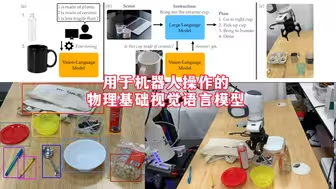
3.96万条众包和41.7万条自动化 的物理概念标注,助力VLMs突破 让机器人像人类一样理解物理世界
瘫痪男人被改造成超级机甲,徒手灭掉一个机甲兵团!
终于,带节奏机器人也被我爆米了
黑客破解特斯拉行车电脑获取自动驾驶加密数据 华尔街日报调查特斯拉自动驾驶与数百起致命车祸
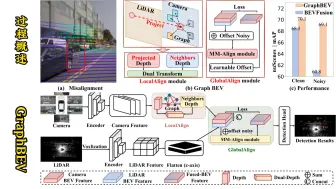
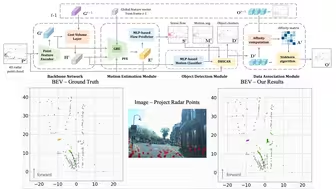
超越BEVFusion!GraphBEV:解决多模态特征不对齐和噪声问题,助力量产
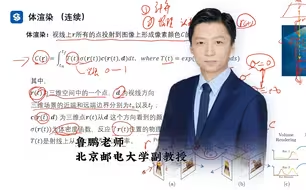
算法原理与代码实践融合讲解的NeRF精品课程之基础篇:体渲染
10大与人工智能相关的<顶级会议>,哪些是你的投递首选?这些顶会论文与SCI论文相比如何呢?
碾压萝卜快跑,特斯拉最新FSD 12.5自动驾驶日夜合集 2
自动驾驶端到端的难点:数据浓度和强化学习
B 站粉丝专享 FSD 第一视角沉浸式体验 43 分钟一镜到底 片尾有彩蛋
StreamPETR—作分享:稀疏向量化表征长时序建模
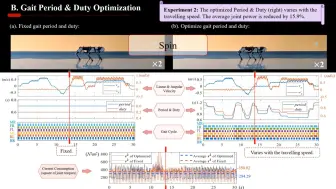
上海交通大学高峰教授团队:六足机器人步态优化框架,让足式机器人像哺乳动物一样行走
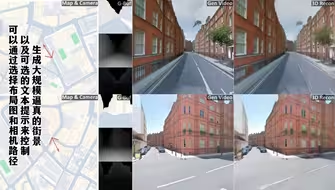
SIGGRAPH 2024 | Streetscapes:谷歌&斯坦福高调喊话:为智驾公司节省高开支,轻松实现“大规模街景生成
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
自主机器人技术线上研讨会第一期:嘉宾宋运龙,报告主题:无人机超高速飞行:强化学习与优化控制
CVPR 2024 | LiDAR Diffusion 首个可以根据多模态条件生成逼真 的激光雷达场景方法,加速107倍
FSDv12.5下高速是个难题!我就喜欢嘴硬的粉丝,哈哈
智界华为自动驾驶中突然违章实线变道,吓坏车主忍不住破口大骂,问界智界享界就这水平?
第十一期智能无人机线下实训精彩回顾
基于图像的3D重建方法:无需COLMAP的3D高斯Splatting技术
【Kurzgesagt】最新一期:人类的终极发明,人工智能!AI - Humanitys Final Invention
第41场 上海交通大学 交龙战队 vs 深圳大学 RobotPilots战队 RoboMaster 2024 超级对抗赛·全国赛
【全568集】清华大佬终于把Python整理成动画片了,教学通俗易懂,2024最新版,学完即可就业!拿走不谢,别再走弯路了,学不会我退出IT界
LIO系统的改进及其在自动驾驶定位模块中的应用 | 高翔
跟风买回来了机器人美少女,居然还是傲娇型?
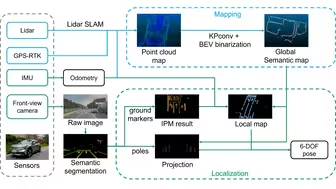
ICRA 2024 | 探索基于语义地图 的自动驾驶汽车单目定位技术
RSS'24满分论文 | ATM框架 无需大量标注,让机器人 从视频学习变得简单高效
我和Ai吵了一架
超越所有SOTA!3DGS结合NeRF到4DGF 重塑动态城市场景新视图合成
ICRA'2024 | 最新开源!RaTrack4D:使用4D雷达点云进行移动物体检测和跟踪
Pineapple party🍍
无人机集群的去中心化和分布式状态估计和协同定位与建图-徐浩/香港科技大学博士