V
主页
ICRA 2024 | 探索基于语义地图 的自动驾驶汽车单目定位技术
发布人
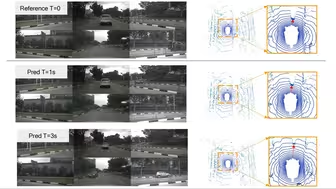
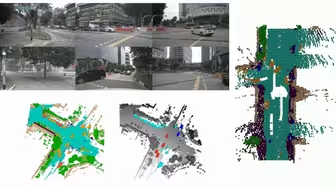
#。。。加“SLYYDS24”,领24年【100篇】最新智驾论文➕多领域【面试真题】。备注『100』优先通过。。。# 该篇论文中提出了一种自动驾驶单目定位算法,利用语义地图和轻量级视觉模型提高定位的鲁棒性和效率。通过激光雷达数据构建地图,结合IPM和优化求解器实现精确定位。实验显示,该算法在不同数据集上具有高定位精度。 标题:Monocular Localization with Semantics Map for Autonomous Vehicles 链接:https://arxiv.org/html/2406.03835v1
打开封面
下载高清视频
观看高清视频
视频下载器
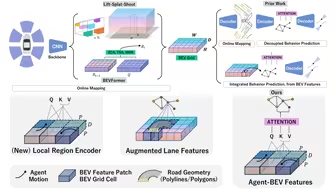
ECCV'24 | "突破传统",通过直接BEV特征注意力加速在线建图和行为预测
浙江大学,百度 | 显著提升BEV三维物体检测性能的体素池方法:BEVSpread
大疆livox-mid360定位
CVPR'24开源 | NeRF正式占领LiDAR新视角合成!LiDAR4D:用于新型时空视图LiDAR合成的动态神经场
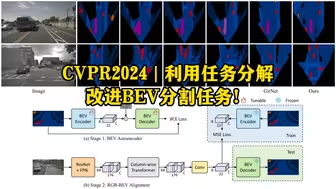
CVPR2024 | 利用任务分解改进BEV分割任务!
自动驾驶行业中的BEV感知技术之美,上帝视角观摩感知技术
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
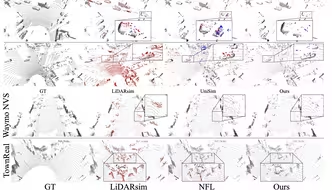
CVPR'24 Highlight 开源,DyNFL:使用NeRF对动态激光雷达场景仿真
一窥大神们与中国智驾的这些年,入局智能驾驶汽车领域的12大企业的技术灵魂人物#端到端#人工智能#自动驾驶#智能驾驶#BEV感知#车载
CVPR2024 | SG-BEV:用于跨视图语义分割的卫星引导BEV融合,可实现精细的建筑属性分割
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
国内智驾老兵百度开源BEVWorld:通过统一BEV潜在空间实现自动驾驶的多模态世界模型
自动驾驶主流感知范式:BEV
BEVFormer一作分享,基于时空融合的BEV感知”
CVPR24 最佳学生论文:实现3DGS新突破,任意尺度无锯齿渲染!三名华人学者参与!
ECCV 2024 代码开源 | HTCL:分层时间上下文,超过LiDAR,问鼎OCC,霸榜所有视觉方案
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
跨域无人军团出征 清华 | LVCP 无需精确先验,基于密切集成 的协同实时相对定位
10元远程开关,无限距离控制
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
开着自动驾驶汽车的你能想到有多少种感知技术在为你保驾护航吗?
清华大学孙富春教授团队 综述:触觉感知在机器人灵巧操作中的应用与进展
问界M7 Pro没有激光雷达,华为纯视觉智驾行吗?喵哥实测给你看
Science Robotics封面 | 当机器人学会用'快照'导航, 轻重量小内存实现'长途跋涉'
【免费公开课】语义信息增强的激光雷达SLAM
ECCV'24 威斯康星大学麦迪逊分校 英伟达 | Dolphins:多模态学习提升自动驾驶像人类一样理解响应各种场景
来自民间的30项关于特斯拉FSD v12版本 以上的实测,带你深度感受端到端 自动驾驶技术线路的优缺点
第十一期智能无人机线下实训精彩回顾
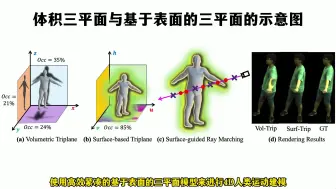
CVPR 2024 | SurMo 革新动态人体渲染技术 实现高效逼真的4D运动模拟
【免费】自动驾驶仿真实践:Apollo&CARLA联合仿真: L2 sec1 CARLA 安装
什么是压力传感器?
ECCV'24 | OpenIns3D:无需2D图像的3D场景理解技术,随意处理复杂推理和文本查询
深蓝学院&元戎启行:听大佬聊自动驾驶
面向自动驾驶应用的激光雷达地点识别-马君驿/弗赖堡大学博士生
HC-SR04超声波传感器详解(STM32)
3元小水泵:开启自动浇水
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
自主机器人技术线上研讨会第一期:嘉宾仲星光,报告:基于隐式神经表示的LiDAR SLAM
HC-SR501人体红外传感器详解(STM32)