V
主页
基于LIO-SAM框架SLAM算法开发(四):建图之断点快速重建
发布人
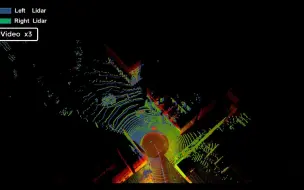
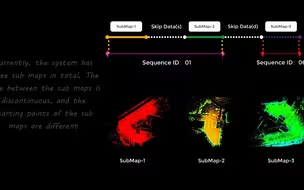
基于LIO-SAM框架开发的紧耦合LIO算法,系列视频的第四期,本期视频内容主要是测试针对大场景建图过程中由于算法不稳定造成的建图失败后,可以实现快速地图重建的功能. 测试采用UbranNav数据集,使用手动切断进程模拟建图失败,进一步使用断点快速重建功能进行断点重建,可以提高较大场景下算法开发效率. 建图算法:https://github.com/YJZLuckyBoy/liorf 进度条打印工具:https://github.com/YJZLuckyBoy/show_progress
打开封面
下载高清视频
观看高清视频
视频下载器
【每日分享】7-基于ROS2 humble的lio-sam算法优化建图
基于LIO-SAM框架SLAM算法开发(一):建图之算法优化
基于LIO-SAM框架SLAM算法开发(二):建图之算法优化(性能测试)
基于LIO-SAM框架SLAM算法开发(八):建图之雷达视觉惯性融合建图-lviorf
无人机定位与导航
基于LIO-SAM框架SLAM算法开发(五):建图之低配R3Live效果实现
基于LIO-SAM框架SLAM算法开发(七):建图之障碍物检测(测试Demo1)
基于LIO-SAM框架SLAM算法开发(三):定位之小场景定位算法
基于LIO-SAM框架SLAM算法开发(六):建图之快速适配多雷达及GNSS设备
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping(Demo 02)
A Simple Lidar Odometry and Multi-Map SLAM(Demo 1)
【C++面试100问】第九十七问:map和set区别是什么,底层实现是什么
RM 全阵容兵种导航建图避障仿真方案
file_player_common:A Common File Player For the Bags
Mid-360 mapping with liorf
激光SLAM重定位视频2
《车规级激光雷达OusterOS0-64》
【C++面试100问】第九十五问:main函数执行前后做了什么?
备战20届讯飞创意组 学妹说还不够快
【C++面试100问】第九十六问:C++标准库里有什么?
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping (Test Video 1)
【每日分享】9-ChatGPT、transformer、LLM、AIGC概念的区别
LS-Lidar Mapping With Liorf (8-Beam)
《三不管》无端械斗2024.8.18青岛小燥
【C++面试100问】第九十八问:优先队列和队列的区别是什么
【每日分享】8-为什么说编程语言还是要学C++或者Java
TSLAM-3D-mid360室内定位无人机 3Dslam 桥梁巡检 室内巡检 觅道MID-360激光雷达建模
非常好 vins-mono,使我的相机飞往太空深处
我给了AI十万块去炒A股…