V
主页
京东 11.11 红包
基于LIO-SAM框架SLAM算法开发(二):建图之算法优化(性能测试)
发布人
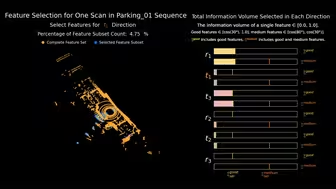
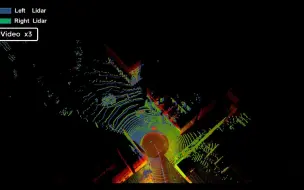
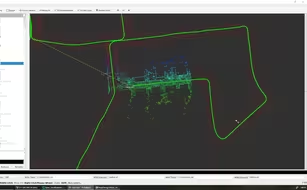
基于LIO-SAM框架开发的紧耦合LIO算法,本期视频内容主要是性能测试,具体改进特性可以查看上期视频 # 基于LIO-SAM框架SLAM算法开发(一):建图之算法优化 #. 压力测试:主要在相同参数、相同算力下接入并处理所有点云数据;Bag包采用2倍速播放 优化特性:https://www.bilibili.com/video/BV1SP411g7Ui 代码仓库(部分未开源):https://github.com/YJZLuckyBoy/liorf csdn:https://blog.csdn.net/qq_42938987/article/details/108434290
打开封面
下载高清视频
观看高清视频
视频下载器
基于LIO-SAM框架SLAM算法开发(一):建图之算法优化
2.LIO-SAM框架介绍
基于LIO-SAM框架SLAM算法开发(三):定位之小场景定位算法
FAST-LIVO2: 高效鲁棒的激光雷达-惯性-视觉融合算法,可用于实时高精度三维重建,无人机和机器人在退化场景的机载定位。
基于LIO-SAM框架SLAM算法开发(七):建图之障碍物检测(测试Demo1)
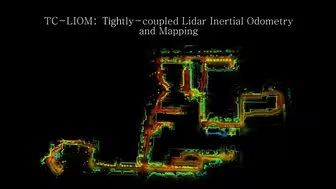
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping(Demo 02)
基于LIO-SAM框架SLAM算法开发(六):建图之快速适配多雷达及GNSS设备
基于LIO-SAM框架SLAM算法开发(五):建图之低配R3Live效果实现
铰接式车辆的运动规划
SLAM-Viewer,SLAM便捷可视化小工具
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
基于LIO-SAM框架SLAM算法开发(八):建图之雷达视觉惯性融合建图-lviorf
基于ROS2的树莓派自主定位与导航小车
ChainSLAM实时建图演示
动态环境中并行轨迹优化
基于LIO-SAM框架SLAM算法开发(四):建图之断点快速重建
【三维重建】photoslam:一种基于超源语的高保真SLAM框架
【海克斯康RealSLAM10】即刻探索三维世界
基于先验地图的通用激光雷达定位框架
基于深度学习特征的长期视觉定位框架
强推!【视觉SLAM十四讲】全书讲解!清华大学原著大佬高翔亲授!真的让人醍醐灌顶!——(人工智能、深度学习、神经网络、Pytorch、OpenAI开发者大会)
激光雷达SLAM多传感器融合算法中工程化技巧总结
多传感器融合算法落地改进建议
SLAM算法三小时即可入门!计算机大佬十节课精讲让你从零到一快速掌握SLAM理论及无人驾驶实战!
GPS丢失情况下无人机定位-VIO+VPS
Mid-360 mapping with liorf
除了激光SLAM和视觉SLAM还有哪些研究方向
火星上的SLAM 非结构环境中的飞行器建图和定位 太空机器人
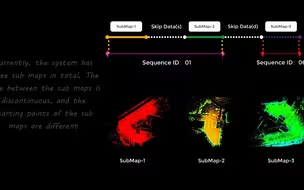
A Simple Lidar Odometry and Multi-Map SLAM(Demo 1)
22.地图更新方法
FI-SLAM: Feature Information-Based Robust and Efficient Vision-Inertial-Aided Li
视觉惯导融合SLAM内外参标定是关键
DOM-60 为机器人带来前所未有的感知能力
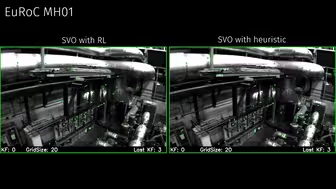
强化学习给视觉里程计自适应调参
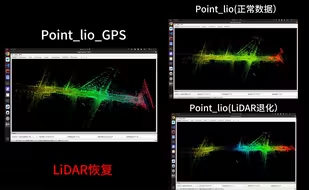
Point_lio_gps解决LiDAR退化导致的里程计漂移。
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
RING#: 基于等变BEV特征的视觉激光通用全局定位
[FRL]我和EVO10的故事
多传感器融合SLAM松耦合与紧耦合
14.异常点筛除机制