V
主页
京东 11.11 红包
file_player_common:A Common File Player For the Bags
发布人
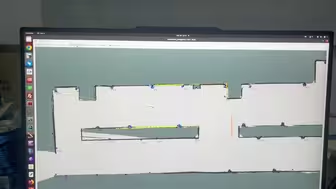
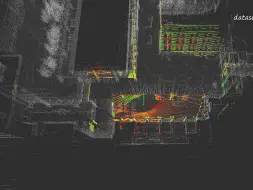
file_player_common是基于file_player_mulran开发的,专门用于管理Bags文件的文件管理器,该管理器可实现以下功能:(1)通过UI界面读取本地Bag文件;(2)可在任意位置暂停、开始播放Bag文件;(3)可通过拖动播放进度条调整播放位置;(4)可随时暂停播放并调整Bag包播放速度;(5)支持读取sensor_msgs::CompressedImage压缩图像并直接转换为sensor_msgs::Image格式;(6)支持读取Livox雷达自定义消息类型 file_player_common:https://github.com/YJZLuckyBoy/file_player_common
打开封面
下载高清视频
观看高清视频
视频下载器
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping(Demo 02)
基于LIO-SAM框架SLAM算法开发(八):建图之雷达视觉惯性融合建图-lviorf
基于LIO-SAM框架SLAM算法开发(六):建图之快速适配多雷达及GNSS设备
基于LIO-SAM框架SLAM算法开发(五):建图之低配R3Live效果实现
Mid-360 mapping with liorf
基于LIO-SAM框架SLAM算法开发(一):建图之算法优化
基于LIO-SAM框架SLAM算法开发(三):定位之小场景定位算法
基于LIO-SAM框架SLAM算法开发(七):建图之障碍物检测(测试Demo1)
ROS2 version of liorf and liorf_localization
LS-Lidar Mapping With Liorf (8-Beam)
绝密魔改版ORB-SLAM——新算子+图像预处理
基于LIO-SAM框架SLAM算法开发(四):建图之断点快速重建
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping (Test Video 1)
轨道车辆激光LIO测试
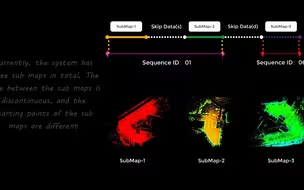
A Simple Lidar Odometry and Multi-Map SLAM(Demo 1)
手持旋转扫描仪构图测试(alpha_lidar)
离线建图加点实用的^ ^
反光柱定位算法-重复定位精度测量(实测重复定位数据1cm以内)
未知环境探索——ROS2树莓派小车实时地图构建和导航
其域创新发布旗舰级手持SLAM产品——灵光 L2 Pro
做着玩儿的光流小飞机室内飞行
实车在真实环境跑一圈测试反光柱定位算法的稳定性
反光柱定位算法及自动重定位算法,其计算得出的定位数据在任何时刻都完全不依赖前一次定位数据,成功突破了市面上同类算法需依赖前一次定位数据作为基准的局限。
自动驾驶感知算法有哪些岗位,技术要求是什么,应该学些什么?
全球最大Mapping赛事
您的第一张surf地图!| terribl 教程(油管机翻)
slamer手搓一个华强北空间屏
【编程提升】第一讲:C++中有哪些宏,如何使用,使用宏有什么优点和缺点,如何替换宏使用
致敬传奇:MAN,What can I say!