V
主页
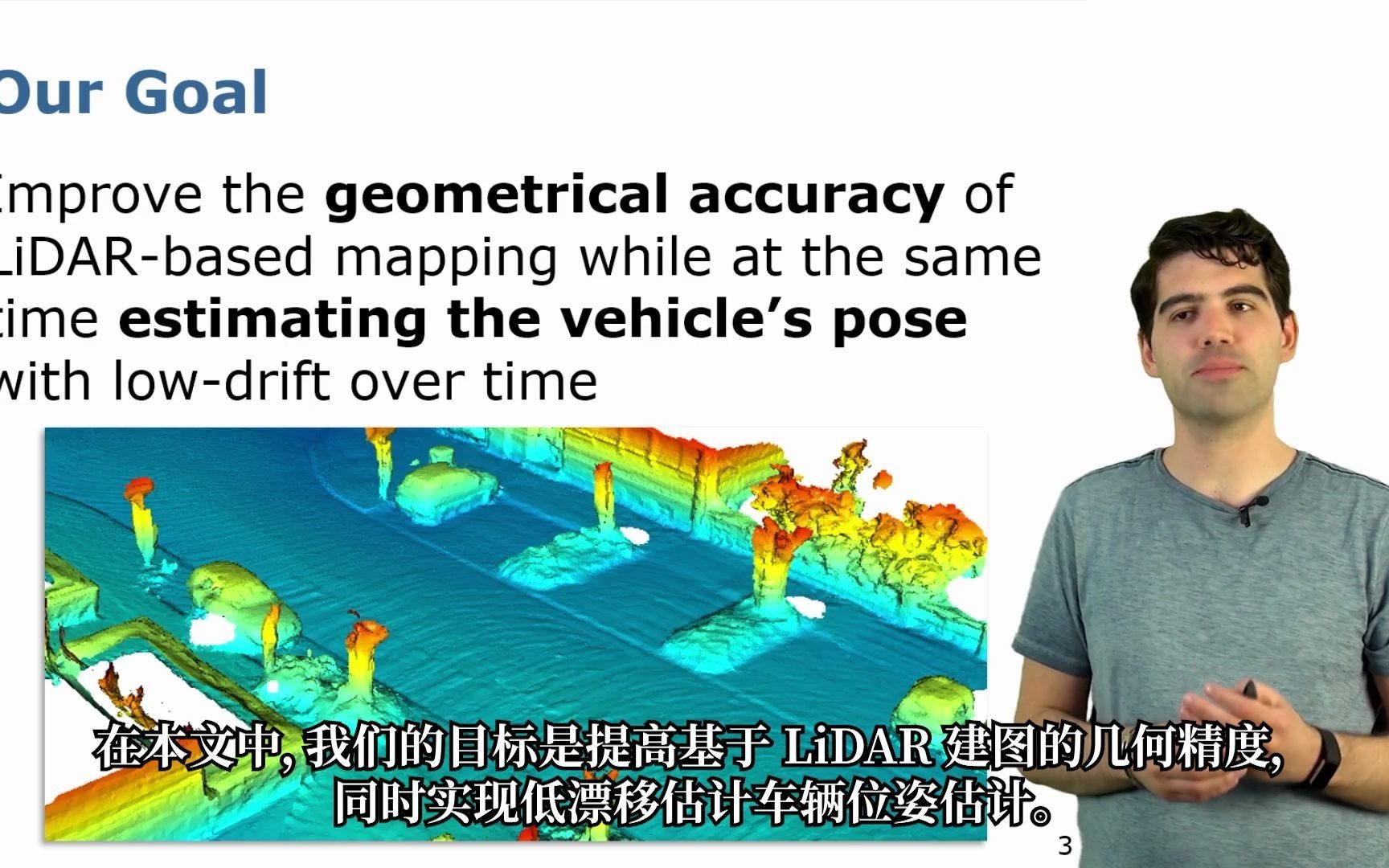
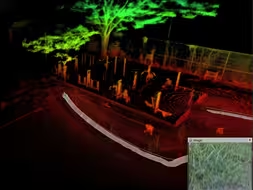
ICRA2021最新开源!基于泊松三维重建的激光雷达里程计和建图!
发布人
1、代码开源!该方法比原始点云地图存储效率高 10 倍,比基于Surfels的地图存储效率高 3 倍,与TSDF地图存储效率类似,但精度更高。 2、开源了本文中所使用的数据集。它一个模拟的城市环境数据集,提供网格地图真值以及模拟的Velodyne激光雷达扫描及其位姿真值。 PPT及开源数据集、代码下载,在公众号【计算机视觉life】后台回复:PUMA
打开封面
下载高清视频
观看高清视频
视频下载器
太酷了!手持激光雷达,即可在线实时重建点云!牛津大学最新发布,可用于森林调查!
ICRA2022|最小化成本,无特征环境下仍能估计轨迹!全局一致和紧耦合的3D激光惯性建图!
2021年度盘点:十大最佳开源SLAM算法!
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
【开源】UCLA提出轻量前端直接激光雷达里程计,针对弱算力平台!
收藏不亏!4个地方,可获得开放的激光雷达数据!
如何快速入门三维重建?应用场景、岗位要求及薪资、技术框架
华科大最新工作分享:基于激光雷达-惯导-轮速计的联合状态估计!
清华等联合开源!动态 3D 高斯超高保真头部重建
yyds!CMU最新开源无人机自主导航开发环境,加速无人机算法研发及部署!
开源!CVPR 2022|TUM&谷歌研究院:基于稠密深度先验的稀疏NeRF重建
纯视觉系统和激光雷达哪个好?迪哥精讲基于纯视觉系统的无人驾驶算法,论文解读+项目实战
RGBD稠密重建开山之作-KinectFusionLib代码解析(下)
ETHZ最新发布X-ICP 极端环境下鲁棒的激光雷达配准
【IROS2022】港科大&大疆即将开源|短时间生成高质量三维稀疏拓扑骨架图,移动机器人的全局规划!
【已完结】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,原理解读+实战分析,迪哥一次性全讲明白!—人工智能/神经网络/深度学习
【开源】ICRA2022|基于激光雷达的终身地图构建和维护框架!
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
深度学习三维重建学习计划
哈工大发布|首个基于线特征的红外惯性里程计ETIO,性能超过了最先进的TIO!
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
【直播回放】武汉大学开源SLAM详解!低成本轮式机器人定位算法 Wheel-INS
这个数据集真强!地下隧道、不同照明等情况下,多机器人视觉SLAM!MIT等最新开源!
地面重建测试 | DLIO+UFOMap
【前沿论文】中科大丨用于闭环的物体语义建图,IROS 2021
【最新开源】TUM&谷歌等研究RGB-D表面重建,细节拉满!CVPR2022
仅需73ms即可重建一帧,无需3D卷积的3D重建!UCL等最新开源,ECCV2022!
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
超有用!三维重建让起重机实现无人装卸!佐治亚理工!
UCLA发布|基于稠密点云的快速定位,实时提供准确的姿态估计!
哈工大、清华联合开源GPS-Gaussian:可泛化的像素级三维高斯溅射,实时人体新视图合成
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
ETHZ开源|可与任何VIO前端兼容的SLAM通用后端!
【开源】太酷了!相机前转一圈,人体模型就有了!天津大学&清华等新研究,CVPR2022
速度提高60倍!重建你的自动驾驶场景 | GaussianCity:无边界三维城市场景重建(南洋理工大学)
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
华科大最新PointDreamer3D纹理重建,清晰如真
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022