V
主页
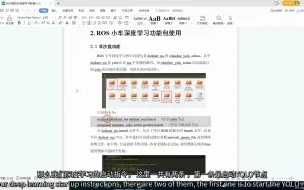
深度学习系列教程|05深度学习沙盘地图自动驾驶——功能演示
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
ROS2功能系列视频教程 (一)| ROS2小车上手操作
ROS入门系列教程(四)——如何把ROS和STM32联系起来(WHEELTEC)
ROS2功能系列视频教程 (三)| ROS2gmapping建图
深度学习系列教程|02通用物体识别与手势控制小车
ROS入门教程系列(七)——ROS多机通信设置(WHEELTEC)
ROS2功能系列视频教程 (二)| ROS2键盘控制
深度学习系列教程|03深度学习沙盘地图自动驾驶——功能介绍
模型预测控制 机器人小讲堂第六讲
ROS2功能系列视频教程 (六)| ROS2 2D导航
ROS2功能系列视频教程 (九)| ROS2视觉跟随
ROS入门系列教程|WHEELTEC
ROS2入门系列视频教程 (二)| ROS2体系框架
ROS入门系列教程(一)——工作空间与功能包(WHEELTEC)
ROS入门系列教程(二)——launch文件与参数服务器(WHEELTEC)
深度学习系列教程|06训练环境搭建和制作自己的数据集
ROS入门系列教程(五)——ROS传感器介绍(WHEELTEC)
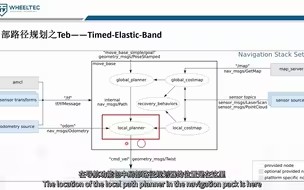
ROS 2D导航原理系列(七)|局部路径规划-TEB算法
【教程】40分钟教你自制自动驾驶智能车
手把手教你如何通过STM32与N10激光雷达实现小车避障
深度学习系列教程|07训练自己的数据集及在ROS端使用
Cursor 用中文编程,让程序开发不再有门槛!全能AI编程利器,带你高效开发 ,Cursor教程 !威廉说
ROS2功能系列视频教程 (十二)| ROS2 KCF跟随
ROS2入门系列视频教程 (七)| ros2bag
ROS 2D导航原理系列教程合集(WHEELTEC)
ROS 2D导航原理系列(三)|全局路径规划-概述
ROS2入门系列视频教程 (八)| ROS2话题通信的c++实现发布方
ROS2入门系列视频教程 (一)| ROS2概述
ROS2入门系列视频教程 (四)| ROS2命令行工具
ROS2入门系列视频教程 (十二)| ROS2Launch启动文件管理工具
激光SLAM的入门讲解视频教程(二)|SLAM实现方向及其拓展
ROS 2D导航原理系列(二)|自适应蒙特卡罗定位AMCL
学完即可就业!一口气刷完3D点云、车道线检测、轨迹预测、三维重建、环境感知、深度估计、关键点特征匹配、行人重识别等八大自动驾驶算法与实战!真的比刷剧还爽!
ROS2功能系列视频教程 (十一)| ROS2 USB手柄控制
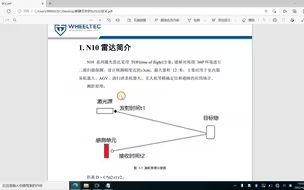
激光SLAM的入门讲解视频教程(一)|SLAM简介
Scratch 神经网络 图像识别
具身智能的风口到了吗
深度学习系列教程|01深度学习和yolov3简介
ROS2功能系列视频教程 (十)| ROS2 WEB浏览器监控
ROS2功能系列视频教程 (七)| ROS2雷达跟随