V
主页
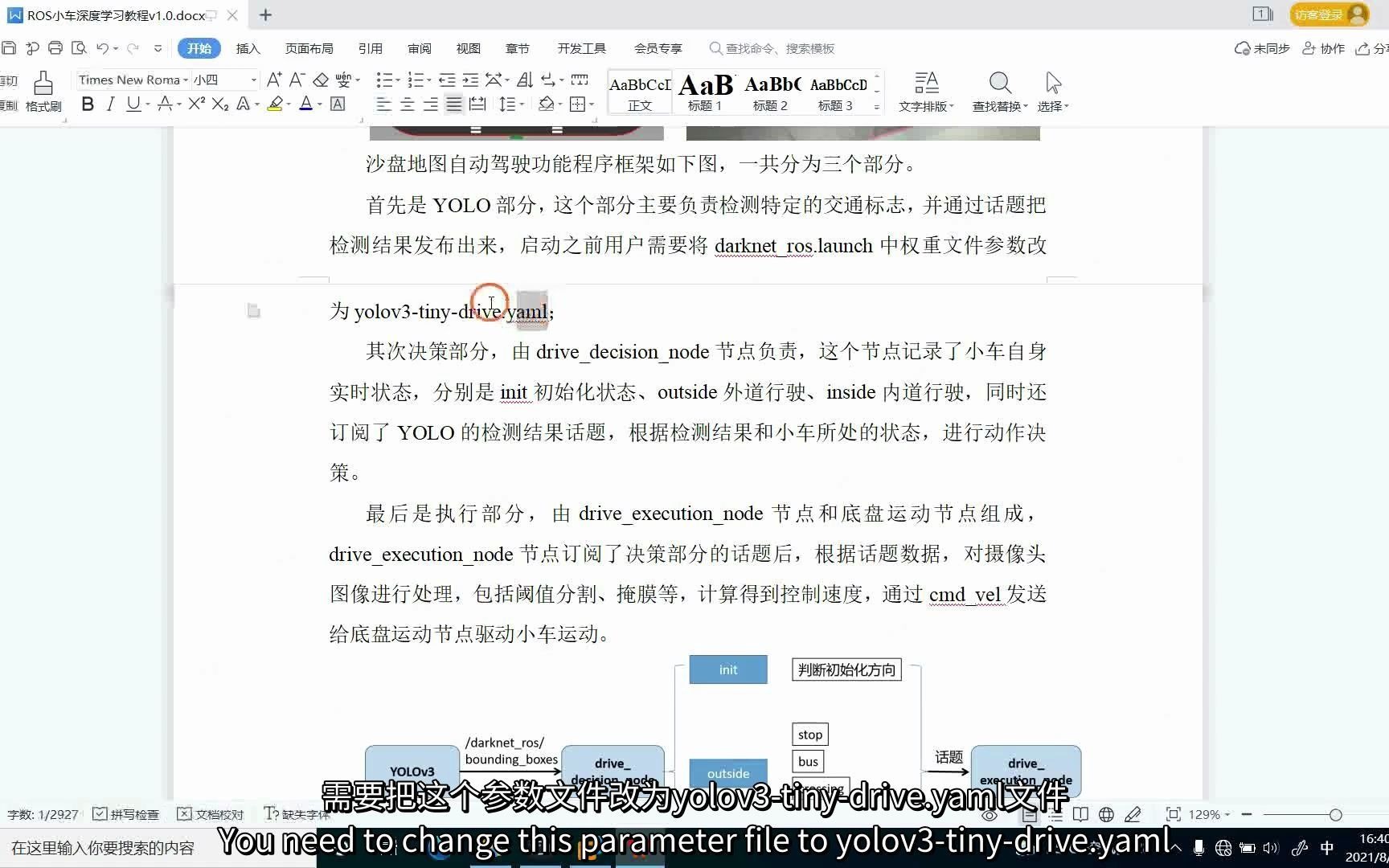
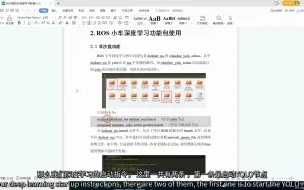
深度学习系列教程|03深度学习沙盘地图自动驾驶——功能介绍
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
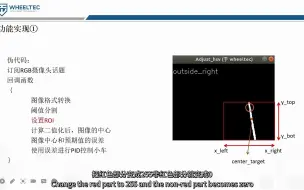
深度学习系列教程|04深度学习沙盘地图自动驾驶——功能详解
ROS入门系列教程(一)——工作空间与功能包(WHEELTEC)
深度学习系列教程|06训练环境搭建和制作自己的数据集
ROS入门系列教程(八)——TF坐标变换(WHEELTEC)
深度学习系列教程|02通用物体识别与手势控制小车
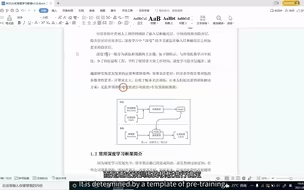
深度学习系列教程|01深度学习和yolov3简介
ROS入门系列教程(六)——rqt可视化工具集(WHEELTEC)
ROS2功能系列视频教程 (二)| ROS2键盘控制
ROS2功能系列视频教程 (三)| ROS2gmapping建图
ROS2功能系列视频教程 (一)| ROS2小车上手操作
ROS入门系列教程(二)——launch文件与参数服务器(WHEELTEC)
ROS2功能系列视频教程 (五)| ROS2 cartographer建图
ROS 2D导航原理系列教程合集(WHEELTEC)
ROS入门教程系列(七)——ROS多机通信设置(WHEELTEC)
ROS2功能系列视频教程 (七)| ROS2雷达跟随
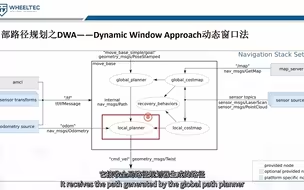
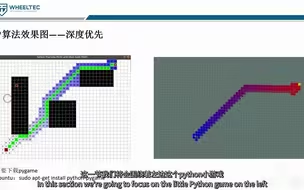
ROS 2D导航原理系列(六)|局部路径规划-DWA算法
手把手教你如何通过STM32与N10激光雷达实现小车避障
ROS2功能系列视频教程 (八)| ROS2视觉巡线
ROS2功能系列视频教程 (十一)| ROS2 USB手柄控制
ROS2功能系列视频教程 (六)| ROS2 2D导航
深度学习系列教程|07训练自己的数据集及在ROS端使用
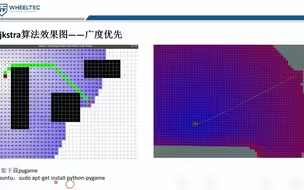
ROS 2D导航原理系列(四)|全局路径规划-Dijkstra算法
ROS 2D导航原理系列(五)|全局路径规划-Astar
激光SLAM的入门讲解视频教程(一)|SLAM简介
ROS麦轮系列机器人功能演示(WHEELTEC)
ROS2功能系列视频教程 (十二)| ROS2 KCF跟随
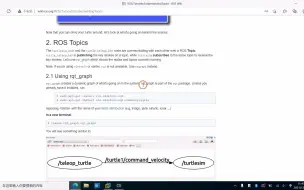
通过英文ROS wiki快速入门ROS教程(六)|使用ROS-tutorials学习话题
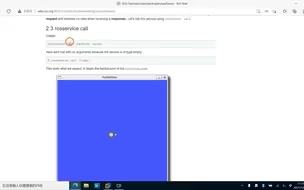
通过英文ROS wiki快速入门ROS教程(七)|使用ROS-tutorials学习服务与参数
通过英文ROS wiki快速入门ROS教程(五)|使用ROS-tutorials学习节点
ROS 2D导航原理系列(三)|全局路径规划-概述
激光SLAM的入门讲解视频教程(三)|liosam原理框架讲解
蛋仔派对:保安队被抓到蛋神实验室?各个变肌肉蛋,必须摧毁这里
ROS Moveit桌面机械臂进阶视频教程(七)|IKfast配置讲解第一部分
手把手教你如何通过STM32与N10激光雷达实现小车跟随
激光SLAM的入门讲解视频教程(四)|liosam工程实现和代码模块讲解(上)
ROS Moveit桌面机械臂进阶视频教程(五)|Moveit_Config参数讲解第一部分
ROS Moveit桌面机械臂进阶视频教程(三)|Rviz界面Motion_Planning插件讲解
手把手教你做六足机器人!
上海世界人工智能大会上的表情模仿机器人,看到她的表演,我也震惊了
ROS Moveit桌面机械臂进阶视频教程(二)|Moveit_Setup_Assistant配置讲解