V
主页
京东 11.11 红包
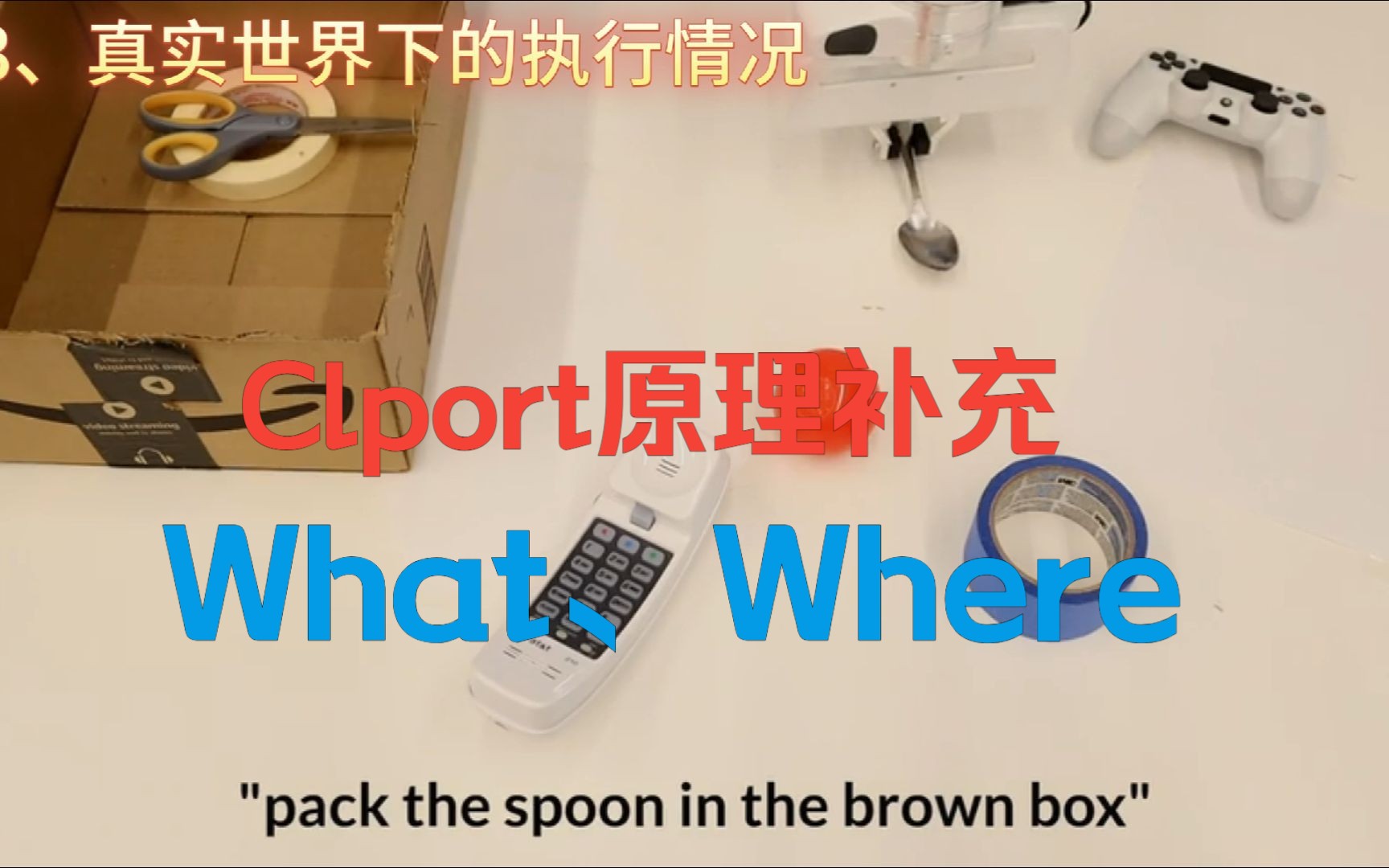
CLiport抓取理解:要求机械臂去抓什么(What)和去哪抓(Where)
发布人
对上个cliport复现视频的补充,主要包含仿真下10个桌面语言任务的执行、算法原理和实际的执行情况。 成为UP主的第30天~(主要是它说今天投稿就会给我5块钱) 所有素材来自官方:https://cliport.github.io/
打开封面
下载高清视频
观看高清视频
视频下载器
机械臂视觉语言抓取初步尝试--->请帮我抓香蕉
《UR10推抓协同:复杂环境下的指定目标抓取》
抓取不止!Ubuntu 18.04下UR5机械臂搭建Gazebo环境|开源分享
Grasp-Anything:利用大模型生成的大规模机械臂数据集
Yolov8算法驱动下UR5的自适应位置抓取
《它又来了!编程展示精准抓取》
【Open-X-Embodiment续】代码实现RT-1-X模型推理和结果分析
UR机械臂在gazebo仿真中推散物体分离场景
宇树Z1机械臂Gazebo仿真控制
智能观察、自主抓取,桌面整理就是如此酷炫!
《Cliport让机械臂大显身手:轻松搞定有序堆叠、抓木块入碗和汉诺塔游戏!》
手把手示范-->代码层次学习机械臂抓取仿真工程
UR机械臂学会理解人类语言,实现目标物体的推抓协同
《场景生成:Gazebo中通过代码添加物体》
《6分半的机械臂新手村学习总结》
这机械臂速度可以干活了吧、、
ok-robot:集成多个大模型的通用型智能机器人
具身智能机械臂实操入门课程-01:软件环境配置和双臂标定
把我机械臂用到的谐波减速器分享给大家
【开源教程】ROS+PX4开源机械臂控制(上)
宇树科技四足机器人Go1仿真(Gazebo下建图导航)
杂乱环境下视觉语言多模态的协同推抓demo展示
10月新番,男人龙傲天,被队伍驱逐的治愈师,其实是最强的,一口气看完1~2集,再见龙生,你好人生,刀剑神域外传,独自一人的异世界攻略,机械臂,悲喜渔生
移动小车在实际环境下的性能测试:建图、导航、定位
交互玩ROS:ChatGPT与机器人合作解决任务的初次尝试
Qt/C++ opengl导入机械臂模型,添加ui拖拽交互,运动插补,包括关节和直线运动,可保存关节点信息
机器人无需预先编程即可自适应新环境
《 MoveIt运动控制来了! 在抓取仿真平台上代码驱动UR抓取绝不止于想象!》
如何在摄像头中精准定位物体的像素坐标
遥操作拧螺丝案例演示
机械臂代码讲解-02
机械臂运用起来了吗?| 智慧搬运侠 || 2023国际青年人工智能大赛
《机器人触觉与灵巧操作入门》全网首门机器触觉系统性课程 灵巧手| 入门教学【课程试看】
小小的也很可爱#迷你机械臂
Day 1 数论专题 | Archy_
我跟你们这群研究机械臂的拼了!竟然连体感追踪都整上了
机械臂执行推动作分散杂乱场景(人为点击版)
开源超低成本谐波减速,文件分享在评论区。
遥操作孪生协作臂
空间机械臂关节驱动器