V
主页
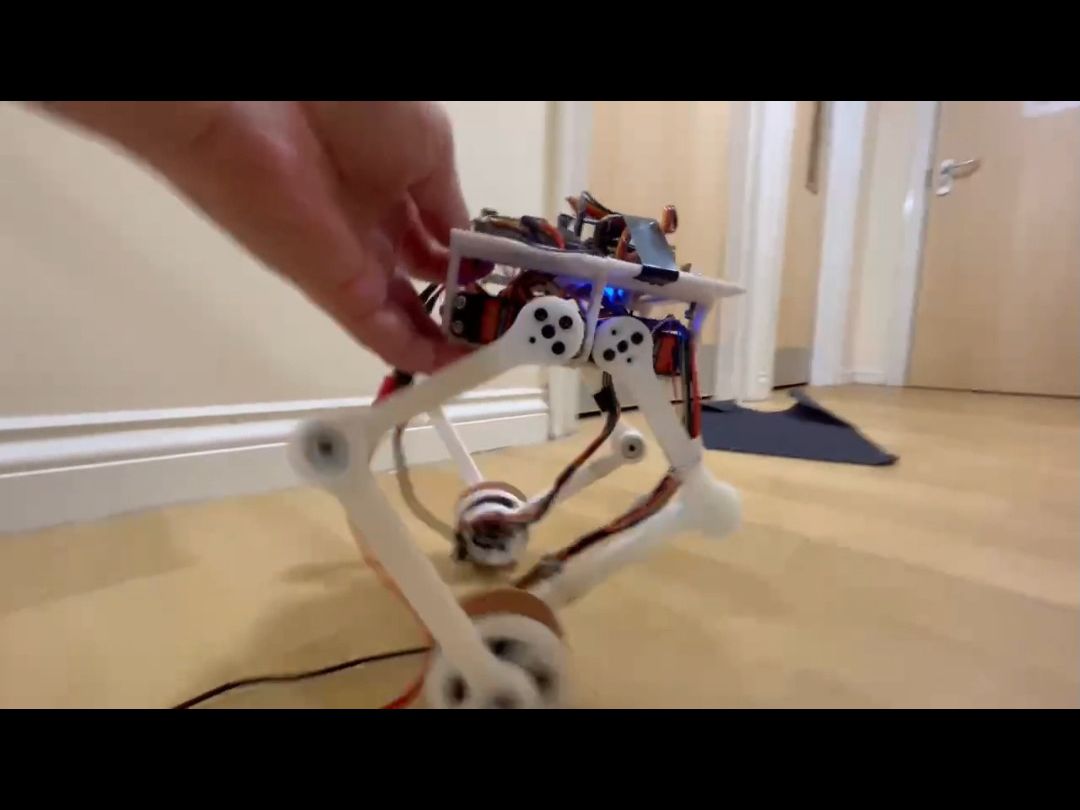
低成本轮腿机器人-腿部协作功能
发布人
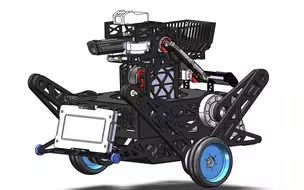
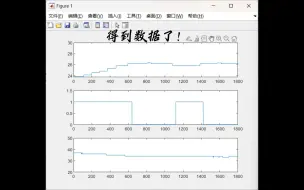
本项目基于国炫学长开源的舵机式轮腿机器人进行开发。新增了手机APP遥控功能和轮腿协作功能,大家不用再购买sbus遥控器了。 现在的腿部五连杆结构会和底盘的轮子进行协作使机器人保持平衡,极大提升了机器人的回归速度。
打开封面
下载高清视频
观看高清视频
视频下载器
轮腿机器人-初步效果展示
【Venus进度记录】四连杆轮腿机器人腿部运动仿真及实物测试
基于arduino的自平衡机器人
轮腿机器人但是毕业设计
轮腿机器人调试-五连杆
人类早期驯服轮腿机器人的珍贵视频
【自制】FOC无刷轮腿平衡机器人
简易自主导航机器人
【自制】Hyun制作教程二
轮腿式平衡机器人复刻--结构组装
【开源啦!】无刷轮腿平衡机器人
【自制】开源 ARDUINO轮腿式机器人第一版Demo
本科毕设 轮腿式双足机器人 开源文件演示
24机创,第一代仿生青蛙,违规且后空翻
【记录】桌面双轮足制作小记(硬件部分)
16个舵机给您带来一段演奏,刚好卡点 !
五天速通平衡步兵
小轮腿完整形态考核!
[自制]首款桌面级双轮腿机器人-DEMO版发布
[自制]桌面级轮腿机器人--基于FOC电机和LQR算法[开源]--弹跳演示
[自制]桌面级轮腿机器人--基于FOC电机和LQR算法[开源]
平民版轮腿机器人进度分享
【上海交通大学2023秋季】设计与制造Ⅱ 仿生青蛙跳跃机器人项目视频
【开源】自制成本贼低的N轴机械臂!
大一做的基于51单片机的六足机器人,成本不到100!当时做出来好开心OvO
毕业设计:双足轮机器人(开源)
简单的控制类实践项目-自动暖气控制器
[自制]双轮腿机器人|“地面FPV”(非RM 轻喷)
毕业设计“智能家居服务机器人”演示视频
要的就是快!六足机器人制作步骤&phoenix code用法
好,自制一个桌面宠物!
横列式矢量双旋翼调试PID及飞行实录
CUMT机器人对抗赛模拟测试赛1
改良版轮腿机器人演示视频
简介的PID介绍和代码实现
LeTian-robot2(轮腿机器人)
【自制】自平衡摩托车
【毕设日记15】四足轮足式机器人全功能展示
24机创青蛙
BladeBug宣传视频